5 Applied Instructions and Basic Usage
State output pin
Name Function
Data
type
Time when there is
a transition in an
output pin’s signal
from low to high
Time when there is a transition in an
output pin’s signal from high to low
Done
The execution of
the motion control
function block is
complete.
BOOL
There is a
transition in the
Done output pin’s
signal from low to
high when motion
of returning home
is complete.
There is a transition in the Done
output pin’s signal from high to low
when there is a transition in the
Execute input pin’s signal from
high to low.
If the Execute input pin is set to
False when the execution of the
motion control function block is
complete, the Done output pin will
be set to False in the next cycle.
Busy
The motion control
function block is
being executed.
BOOL
There is a
transition in the
Busy output pin’s
signal from low to
high when there is
a transition in the
Execute input
pin’s signal from
low to high.
There is a transition in the Busy
output pin’s signal from high to low
when there is a transition in the
Done output pin’s signal from low
to high.
There is a transition in the Busy
output pin’s signal from high to low
when there is a transition in the
Error output pin’s signal from low
to high.
There is a transition in the Busy
output pin’s signal from high to low
when there is a transition in the
Aborted output pin’s signal from
low to high.
Error
An error occurs in
the motion control
function block.
BOOL
Input values are
incorrect.
The motion of the
axis specified is
not uniaxial
motion, gear
motion, or cam
motion.
There is a transition in the Error
output pin’s signal from high to low
when there is a transition in the
Execute input pin’s signal from
high to low.
3. Troubleshooting
Error Troubleshooting
The values of input pins in the motion control function
block are incorrect.
Check whether the values of the input pins are in the
ranges allowed.
The motion control function block conflicts with other
motion control function blocks.
Make sure that other uniaxial motion control function
blocks are not started or the execution of other
uniaxial motion control function blocks is complete
before the motion control function block is started.
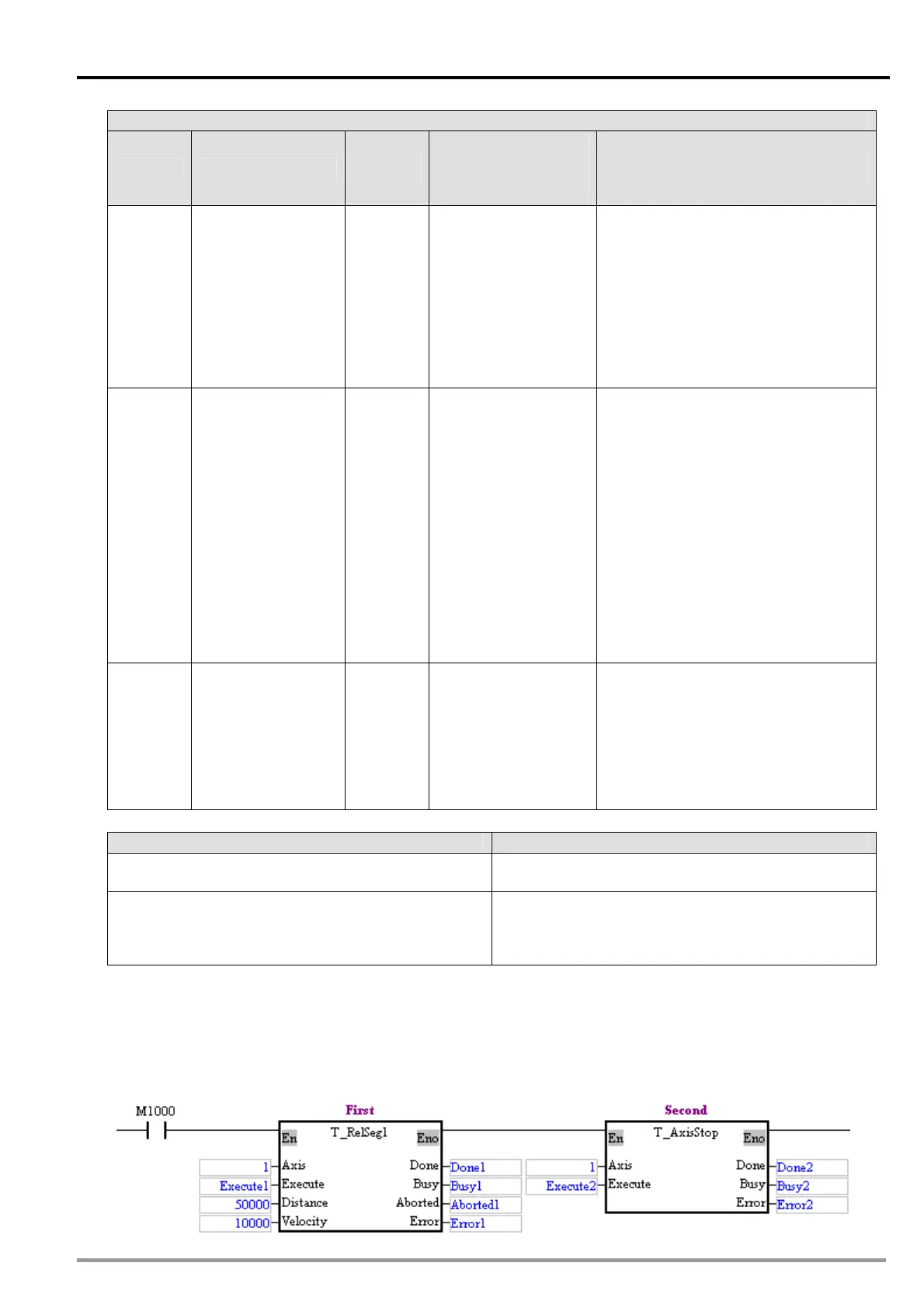
4. Example
The single-speed motion of an axis is started, and then the motion control function block T_AxisStop is
used to stop the motion.
The motion control function block named First is used to start single-speed motion. It is set so that the
first axis moves for 50,000 pulses at a speed of 10,000 per second. The motion control function block
named Second is used to stop the motion of the first axis.
DVP-20PM Application Manual
5-185

 Loading...
Loading...








