EPSON Stylus Pro 9000
Technical Overview 26
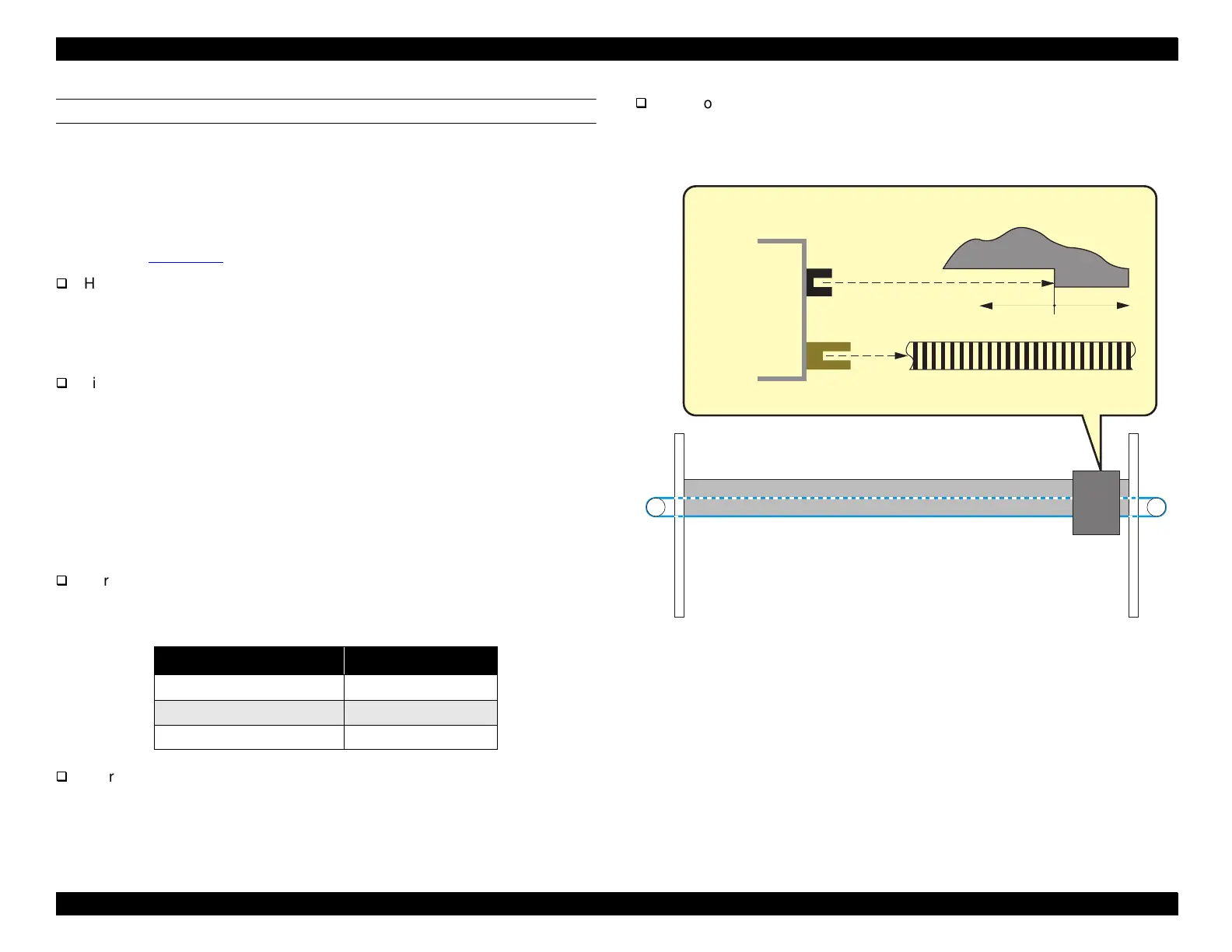
CARRIAGE MOTOR AND POSITION CONTROL
For the greatest possible print accuracy and to minimize vibration, the printer
uses a DC motor to move the carriage. Because a rubber timing belt would
stretch over the long distance the carriage must travel during printing, the
Stylus Pro 9000’s timing belt is made from steel.
The following sensors are located on the carriage and control the carriage’s
position (see
Figure 2-7
):
HP Sensor
This optical sensor activates when the CR Guide Rail flag enters the space
between the sensor’s light emitter and the light receiver. The flag is located
just above home position, and the HP sensor sends an ON signal when the
carriage is in home position.
Linear Encoder Sensor
This sensor determines the position of the carriage by counting bands on
the timing fence (timing strip) while the carriage is in motion. The bands
have a distance equal to 180 dpi. For every band the Linear Encoder
passes over, it sends a print timing pulse to the software servo system.
The software servo forms a closed-loop with the CR motor and Encoder
Sensor. It receives feedback from the Encoder Sensor and adjusts the
current to the CR motor to maintain constant carriage speed.
Carriage Speed and Acceleration
Carriage Speed
The carriage speed during printing is described below.
Carriage Acceleration
Due to the carriage’s quick acceleration, even after the heads reach and
maintain normal speed, they are not stable enough to print for the next 10 mm.
CR Motor Motion Failure
During operation, the encoder measures the distance the carriage travels. If
the CR speed as determined by the encoder varies too much from the speed
set by the Software Servo, a fatal error occurs (Service Call 00010005).
Figure 2-7. Carriage Mechanism Sensors
Table 2-3. Carriage Speed
Print Mode Carriage Speed
720 dpi & Normal M/W 200 cps
4 Pass FOL printing 300 cps
Unidirectional 400 cps
CR Guide Rail flag (projected
area)
Timing Strip
Linear
Encoder
HP Sensor
Carriage
Carriage
HP signal
No HP signal