4. Operation
4.1 Basic Operation
4-2
ME0342-4B
4.1.2 Basic Operation Methods
There are two types, Positioner Mode and Pulse Train Control Mode, for the operation. Select the
suitable one considering the system function.
There are various types of actuators including slider, rod, rotary and gripper types. The same
operation control method is applicable unless particular descriptions are contained in this
manual.
[1] Positioner Mode
Operation Ready・・・・Resistration of Position Data (Example of Registration of PC Software)
• Procedure 1 : Turn ON the controller.
• Procedure 2 : Start up the PC software and establish connection to the controller.
to connectable controller
Press the OK
(Connection mode check)
4.1 Basic Operation
ME0342-4B 4-3
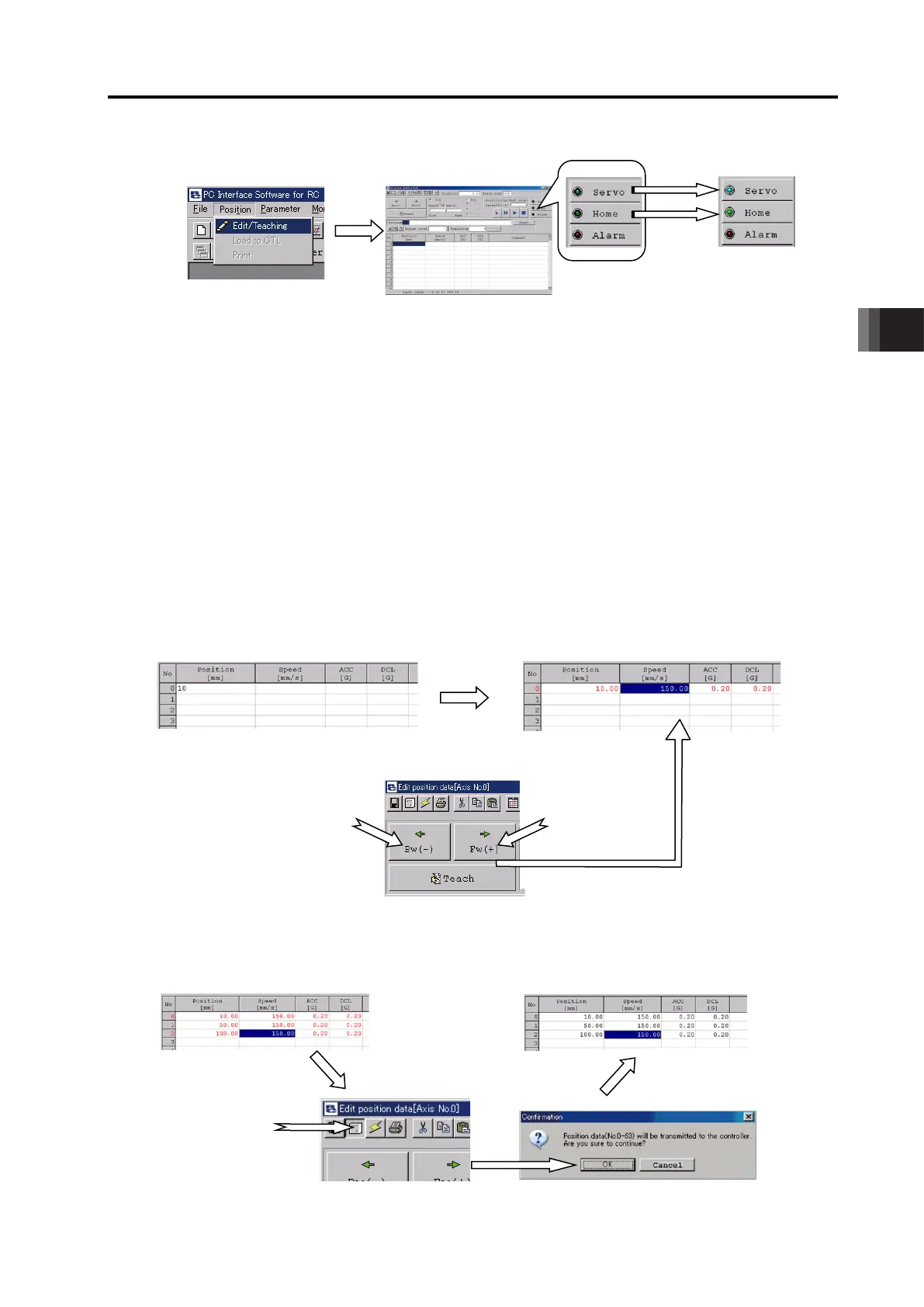
• Procedure 3 : Turn the servo ON, and have a home-return operation.
• Procedure 4 : Define the destination (position) of the slider or rod of the actuator.
The destination can be defined by using the following two methods:
1) Read out the coordinate values from such a tool as CAD.
2) Drive the slider or rod with the JOG operation to the destination,
and set the position data directly.
• Procedure 5 : Type the destination in the column of Position in Position Table. Writing the
position should allow the automatic input of the setting as parameters in the
velocity and acceleration/deceleration columns.
☆ Set position directly with JOG operation
JOG (Backward) JOG (Forward)
• Procedure 6 : Transfer the information such as Position that is written in Position Table to the
controller.
before transferred
transfer complete
to Controller
Edit / Teach in Menu
2) Turn on the Servo lamp
3) Press the Home
4) Turn on the Home lamp
(after actuator is stopped)

 Loading...
Loading...






