4. Operation
4.2 Operation in Positioner Mode
4-14
ME0342-4B
(3) Velocity [mm/s] :
Set the velocity in the operation.
Refer to the following “Caution” when having a value above the maximum velocity.
Do not attempt to input a value below the minimum velocity
(Note 1)
.
Note 1 The minimum velocity differs depending on the type of the actuator. Refer to [9.4.1
Specifications for Actuators].
(4) Acceleration [G] :
Set the acceleration at start.
(5) Deceleration [G] :
Set the deceleration at stop.
Caution
● Set the velocity, acceleration and deceleration so that they do not exceed the rating
values described in the brochure or the instruction manual of the actuator. Failure to
follow this may cause the life of the actuator to be shortened extremely.
● If shocks and/or vibrations appear on the actuator and/or the work, lower the acceleration
and/or the deceleration. In such cases, do not continue the use of the actuator, otherwise the
product life may be shortened extremely fast.
● If the payload is extremely lighter than the rated payload, increase accel...,
acceleration/deceleration to larger than their rated values to shorten the tact time.
Check the specifications in the catalog or an instruction manual of the actuator.
● For the actuator of gripper type, set the velocity, acceleration and deceleration on the
single finger basis. Note that the relative velocity, acceleration and deceleration between
both the fingers are as twice as the setting values.
Reference
● How to set the acceleration is described below. The same idea can be applied to the
deceleration.
1G=9800mm/s
2
: Accelerated to 9800mm/s per second
0.3G: Accelerated to 9800mm/s × 0.3 = 2940mm/s per second
4.2 Operation in Positioner Mode
ME0342-4B 4-15
(6) Pressing [%] :
Setting proper data here allows pressing to be done.
Set the pressing torque (current limit) in percent [%] for PCON-CB/CGB/CFB/CGFB. If the
value is set to 0, the normal positioning operation is performed. The speed for the pressing
operation is set in Parameter No.34.
If the setting of (3) is lower than the pressing velocity, the pressing process will be
conducted with the velocity of (3).
The pressing force of when the maximum pressing current limit is set using PCON-
CBP/CGBP should be the maximum pressing force [N] when the force sensor is used.
The target pressing force [N] should be figured out with the formula below.
Note 1 The maximum pressing force [N] when the force sensor is used and the maximum
pressing current limit [%] should differ depending on models. Shown in the table
below is the values for each model.
Actuator
(Pulse Pressing)
when the force sensor is
Max. Pressing
Current Limit [%]
RCP6-RRA7R-LCT
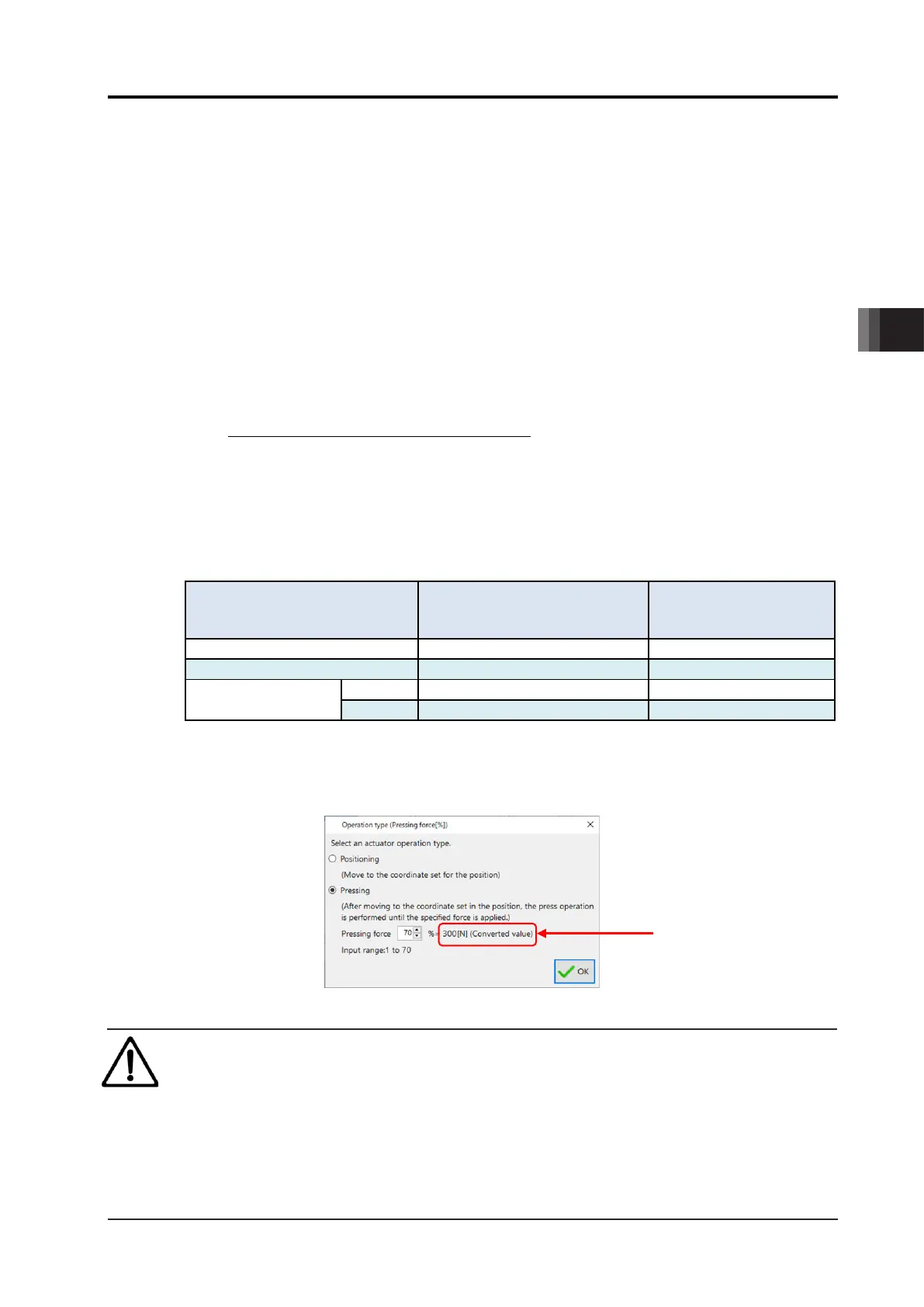
Reference :
Input "Pressing Force [%]" of the position data in the PC teaching software, and the
converted "Target Load (Target Pressing Force) [N]" should be shown.
* There is the same feature equipped in the teaching pendant TB-02/TB-03.
Caution
● If the pressing velocity is changed, the pressing force may differ from that specified in
[9.4 List of Specifications of Connectable Actuators].
When the pressing velocity is changed, make sure to measure the actual pressing force
before start using.
● Using the force sensor used pressing and the pressing force should be constant even in
different pressing velocity.
Max. Pressing Force [N]
when the force sensor is used
(Note 1)
Target Pressing Force [N]
Max. Pressing Current Limit [%]
(Note 1)
Target load should be
shown in [unit: N]

 Loading...
Loading...







