4. Operation
4.2 Operation in Positioner Mode
4-42 ME0342-4B
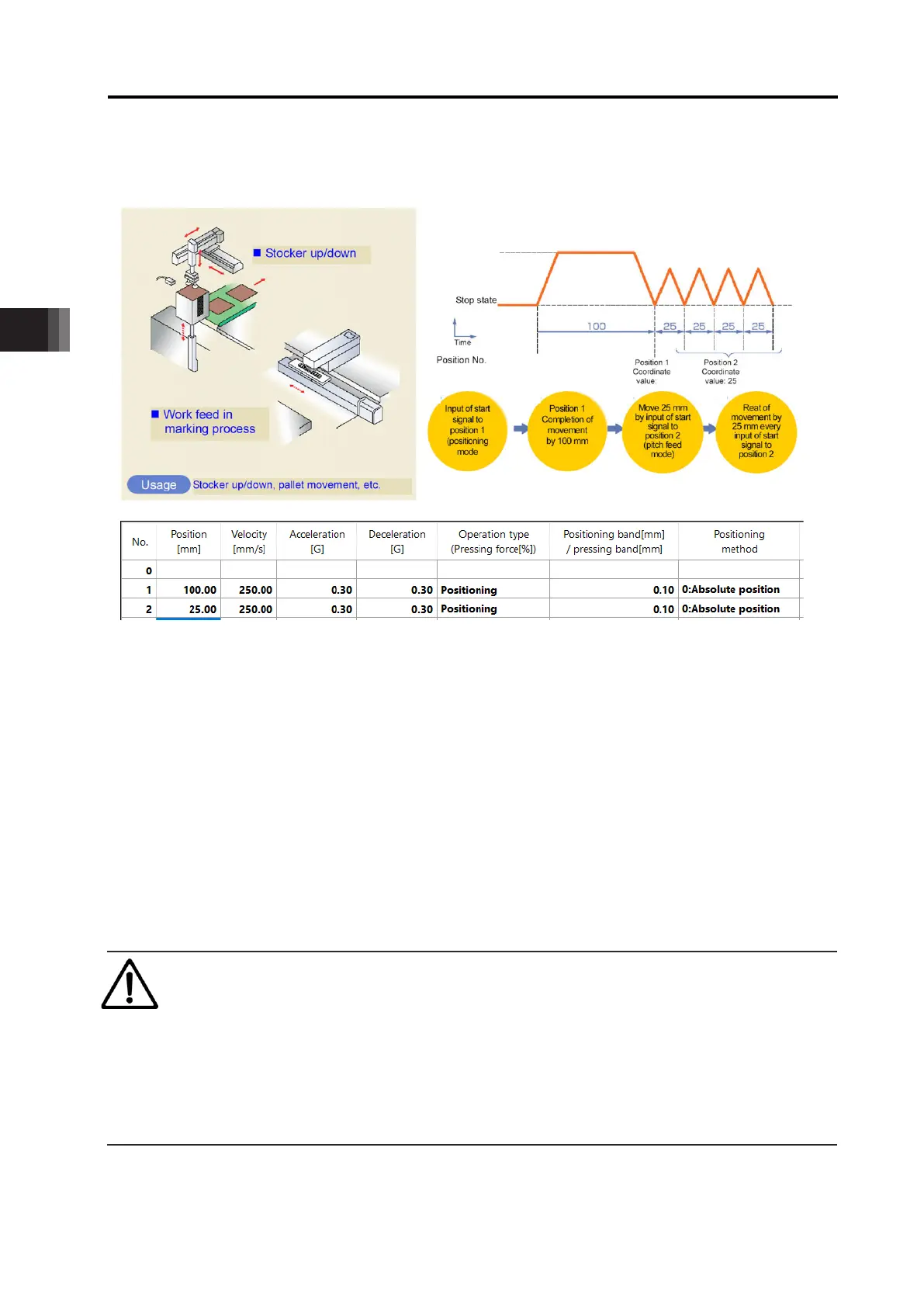
[3] Pitch Feeding (Relative Movement = Incremental Feed)
■ Sample use
(Position No.2 sets pitch feed.)
■ Control method
1) The method of controlling pitch feed is the same as that described in [1] Positioning except
the setting of the position table. Repeat the positioning of a specific position No. .
2) For pitch feed, the position set in the position table indicates the pitch. Set the pitch (relative
moving distance = incremental moving distance) in column “Position”.
If the operation command is issued, the actuator moves from the current stop position by
“Position” in the position table. To perform continuous movement, repeat the operation.
Any accumulation error does not occur because the home position (coordinate value 0) is
specified as the base point.
Caution
● In the pitch feed, do not perform a command with a pitch smaller than the minimum
encoder resolution (lead/encoder pulse number) or that less than positioning accuracy
repeatability.
There would be no deviation to occur even with the command because it is an operation
command to the same position as the positioning complete condition, but the positioning
control cannot be performed properly.

 Loading...
Loading...







