4. Operation
4.2 Operation in Positioner Mode
4-60
ME0342-4B
4) At the completion of writing, controller write complete signal WEND is output. Then turn the
PWRT signal OFF.
5) When the PWRT signal is turned “OFF” the WEND signal is also turned “OFF”.
Turn OFF PWRT after confirming WEND is turned ON.
Turning it OFF before turning ON disturbs the proper data writing.
Caution: Caution on First-Order Lag Filter
● Set the period taken from entering position No. to turning the PWRT ON to 6ms or
longer. In spite of 6ms timer process in the PLC, commands may be input to the
controller concurrently to cause writing to another position. Take the scanning time in
the PLC into account, set a period as 2 to 4 times as the scanning time.
● Turning the PWRT signal ON in the state in which home return is not completed (the
HEND signal is set to ON) causes alarm 093 “PWRT signal detected before completion
of home return” to occur.
● Turning PWRT signal OFF before turning WEND signal ON disturbs the proper data
writing.
● Writing processing with position table screen remaining open on a teaching tool such as
PC software cannot lead the data on the screen to be updated. To update and confirm
writing data, take the following actions:
1) PC software : Left-click the button.
2) Teaching Pendant : Change to user adjustment screen, input “4” in adjustment No.
and return to the position table screen after software reset.
Refer to the relevant Instruction Manual for details of operation.
Current value write signal
writing prosess
(Controller)
Writing Completion Signal
PC1 to PC**
(PLC→Controller)
4.2 Operation in Positioner Mode
ME0342-4B 4-61
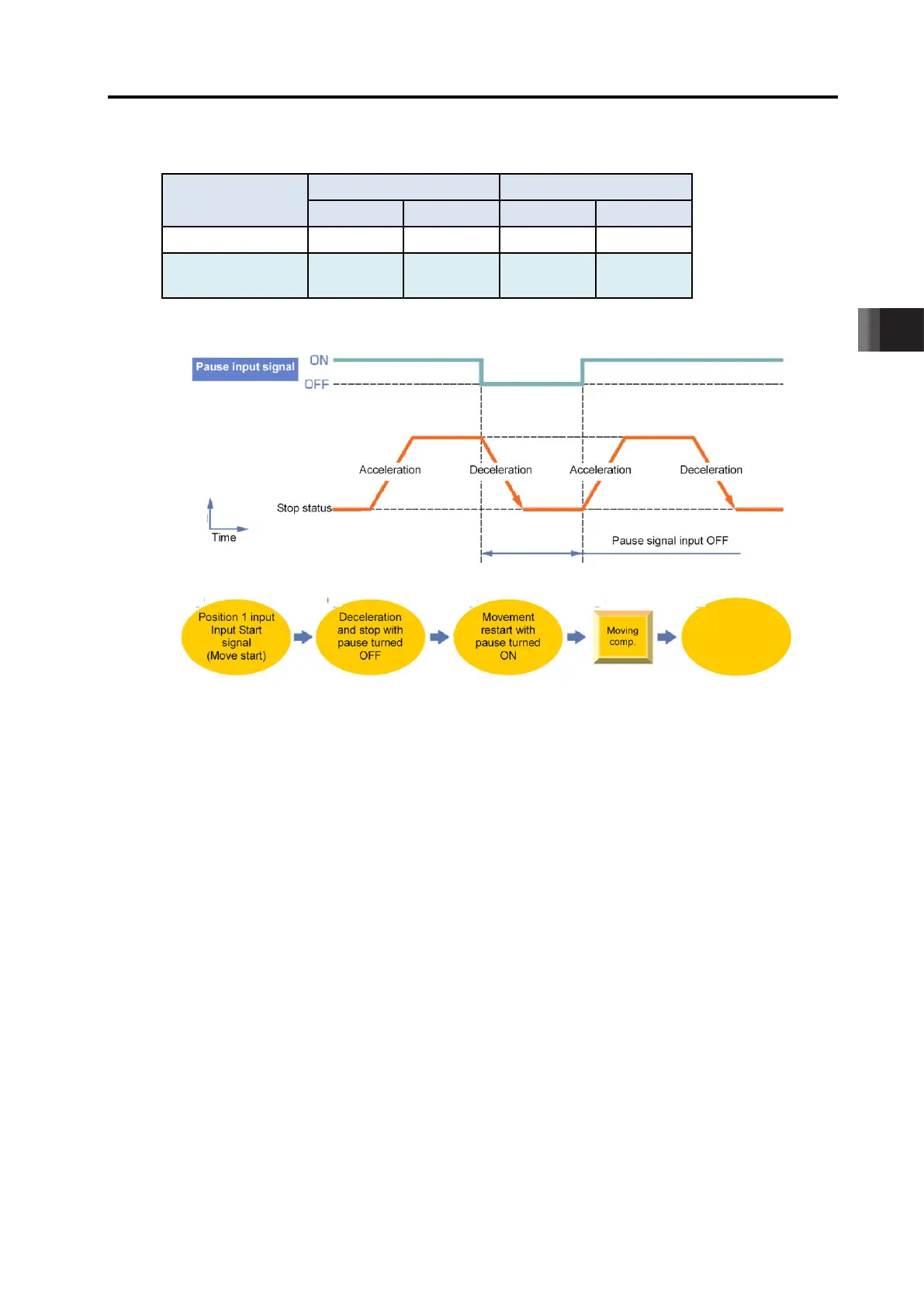
[8] Pause and Operation Interruption (*STP, RES, PEND, MOVE)
PIO signal
Patterns 2 to 3
×
: Existence of signal, ×: No signal
■ Control method
Pause is possible during movement. In addition, the remaining moving distance can be
cancelled to interrupt the operation.
The pause signal is an input signal always set to ON. So, it is normally used to remain ON.
Use this function for interlock in case where an object is invaded into the moving direction of the
actuator being moved.
1) If pause signal *STP is turned off during operation of the actuator, the actuator is decelerated
to a stop. The deceleration is defined by the value set in the position table.
2) During pause, moving signal MOVE is set to OFF but positioning complete signal PEND is
not turned ON.
3) If pause signal *STP is returned to ON, the actuator continues the remaining movement.
The acceleration is the value set in the position table.
4) Turn the reset signal RES on during pause (*STP being OFF), and the remaining movement
should be cancelled to interrupt the operation.
Completion
Signal Output

 Loading...
Loading...






