6. Parameter
6.1 Parameter
6-21 ME0342-4B
[24] Velocity Loop Proportional Gain (Parameter No. 31)
No. Name Unit Input range
Default initial value setting
31
Velocity loop proportional
gain
- 1 to 99,999,999
In accordance with actuator
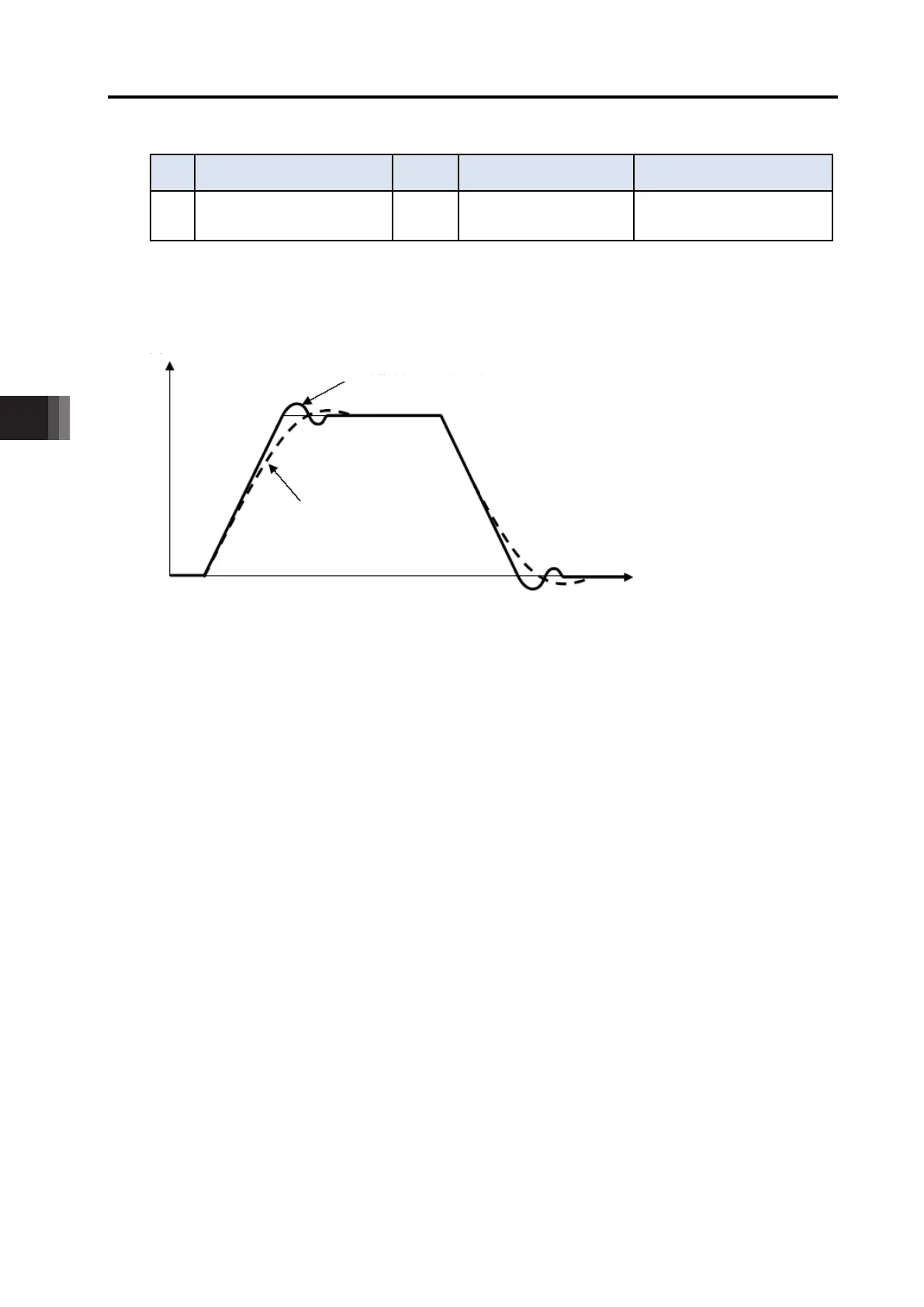
This parameter determines the response of the velocity loop. The increased set value improves
tracking of speed command. The higher the setting value, the greater the load inertia becomes.
If it is too high, overshoot and oscillation, as well as vibration in the mechanical system may
occur.
For the conditions for using this item, refer to [Refer: Selection and use of Velocity Loop
Proportional Gain and Velocity Loop Integral Gain [25]] at the bottom of the following page.
When the setting value is high (overshoot)
When the setting
value is low
Speed

 Loading...
Loading...







