Parker Hannifin
P series User Guide 192
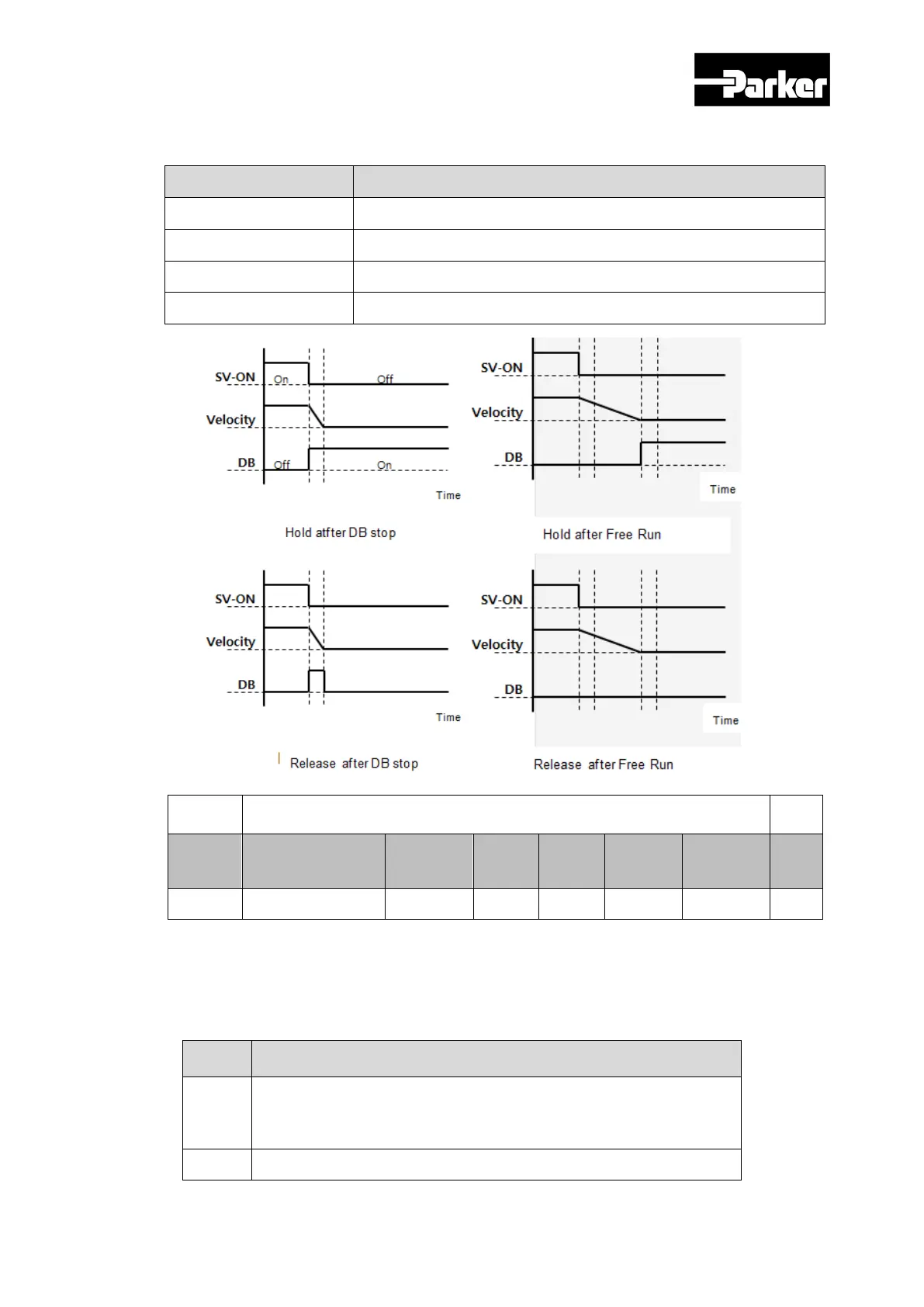
Sets the dynamic brake control mode when turning off the servo
Stop with the dynamic brake and hold
Stop with the dynamic brake and release
Stop free run and release
Emergency Stop Configuration
Sets how the motor stops in case of emergency stop (when POT, NOT, ESTOP is
input). The deceleration/stop mode with emergency stop torque is not applied under
the torque control mode.
Stop the motor using the method set at the dynamic brake mode
(0x2012)
Stop the motor using the dynamic brake and maintain the torque
command at 0
Decelerate and stop using the emergency stop torque(0x2113)
 Loading...
Loading...






