Drive functions
7.3 Function modules
Function Manual
Function Manual, 01/2011, 6SL3097-4AB10-0BP3
249
Overview of important parameters (see SINAMICS S110 List Manual)
● p0494[0...n] Equivalent zero mark input terminal
*)
● p0495 Equivalent zero mark input terminal
*)
● p2596 BI: EPOS set reference point
● p2597 BI: EPOS referencing type selection
● p2598 CI: EPOS reference point coordinate, signal source
● p2599 CO: EPOS reference point coordinate value
● p2600 EPOS reference point approach, reference point offset
*)
Parameter p0494 has the same meaning as parameter p0495. In addition, parameter
p0494 has an encoder data set dependency, which can, for example, be used when
switching over datasets for exchangeable heads.
7.3.6.4 Referencing with more than one zero mark per revolution
The drive detects several zero marks per revolution when using reduction gears or
measuring gears. In this cases, an additional BERO signal allows the correct zero mark to be
selected.
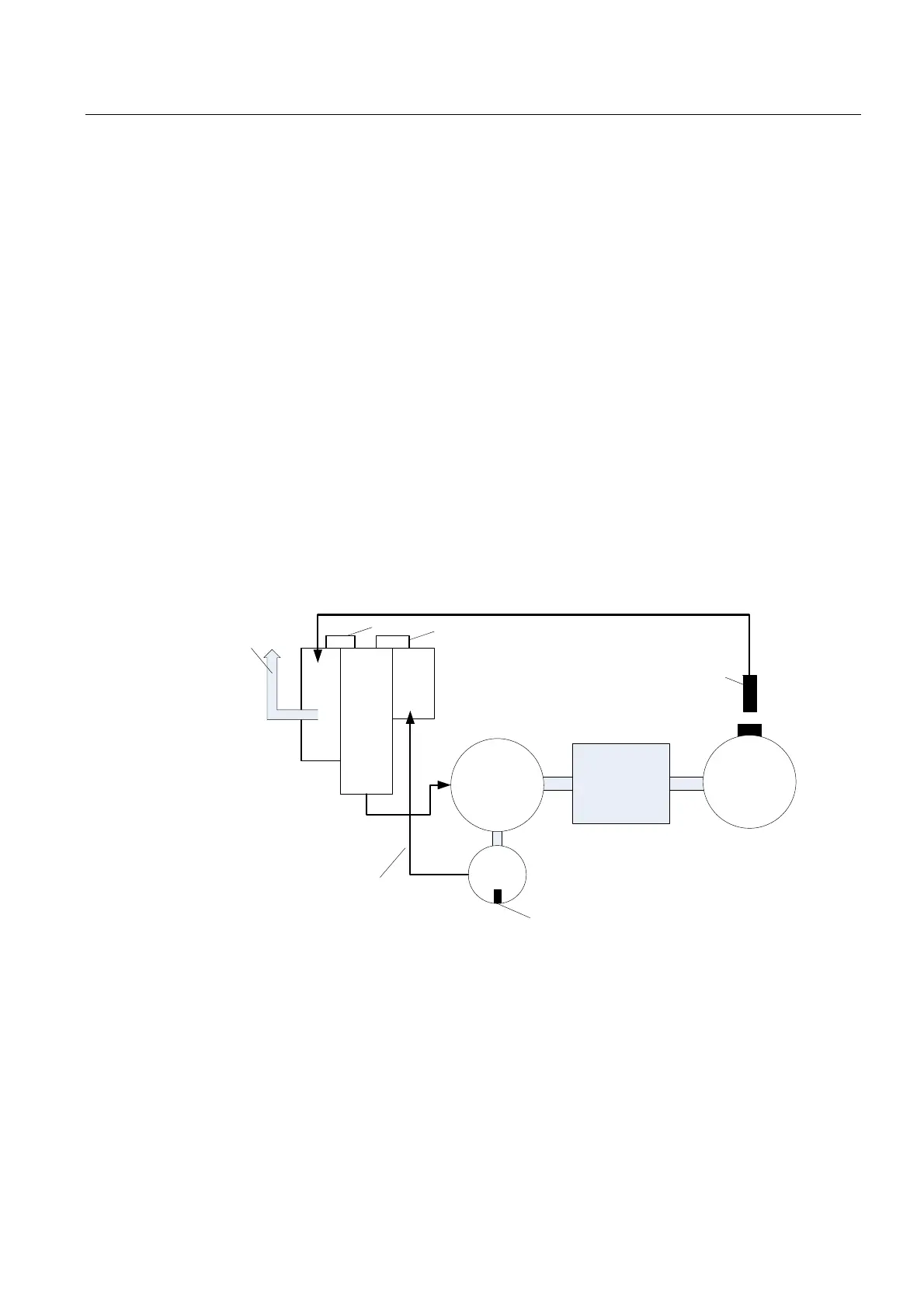
Example with a reduction gear
Gear
4 : 1
Spindle
CU MoMo
SMC
Encoder
Motor
Position
BERO
Zero mark
DQ
DQ
PROFIdrive
encoder interface
Figure 7-52 Design with a gear between the motor and spindle
The diagram shows an application example for referencing with several zero marks per
revolution and selecting the correct zero mark using a BERO signal.
By using a reduction gear between the motor and the load (spindle), the drive detects
several revolutions of the motor per mechanical revolution of the load - and therefore also
several encoder zero marks.
The higher-level control/position control when referencing requires a unique reference
between the encoder zero mark and the machine axis (load/spindle). This is the reason that
the "correct" zero mark is selected using a BERO signal.

 Loading...
Loading...












