© Stäubli 2009 – D28070504A CS8C110 / 248
Configuration for the "remoteMCP" option
This option can be used to make a full simulation of the MCP when it is replaced by its shorting plug. It thus enables
an MCP OEM to be connected to the CS8C controller.
CAUTION:
The "remoteMCP" option must be used with great care to meet the requirements of the safety
standards in force. In particular:
• A mutual supervision software mechanism must be set up between the MCP OEM and the
CS8C. It stops the robot as soon as the MCP OEM switches to fault status and checks that
the status of the robot on the MCP OEM is correct.
• The redundant entries for the enable button and the presence detector on the holder must
be wired to separate signals.
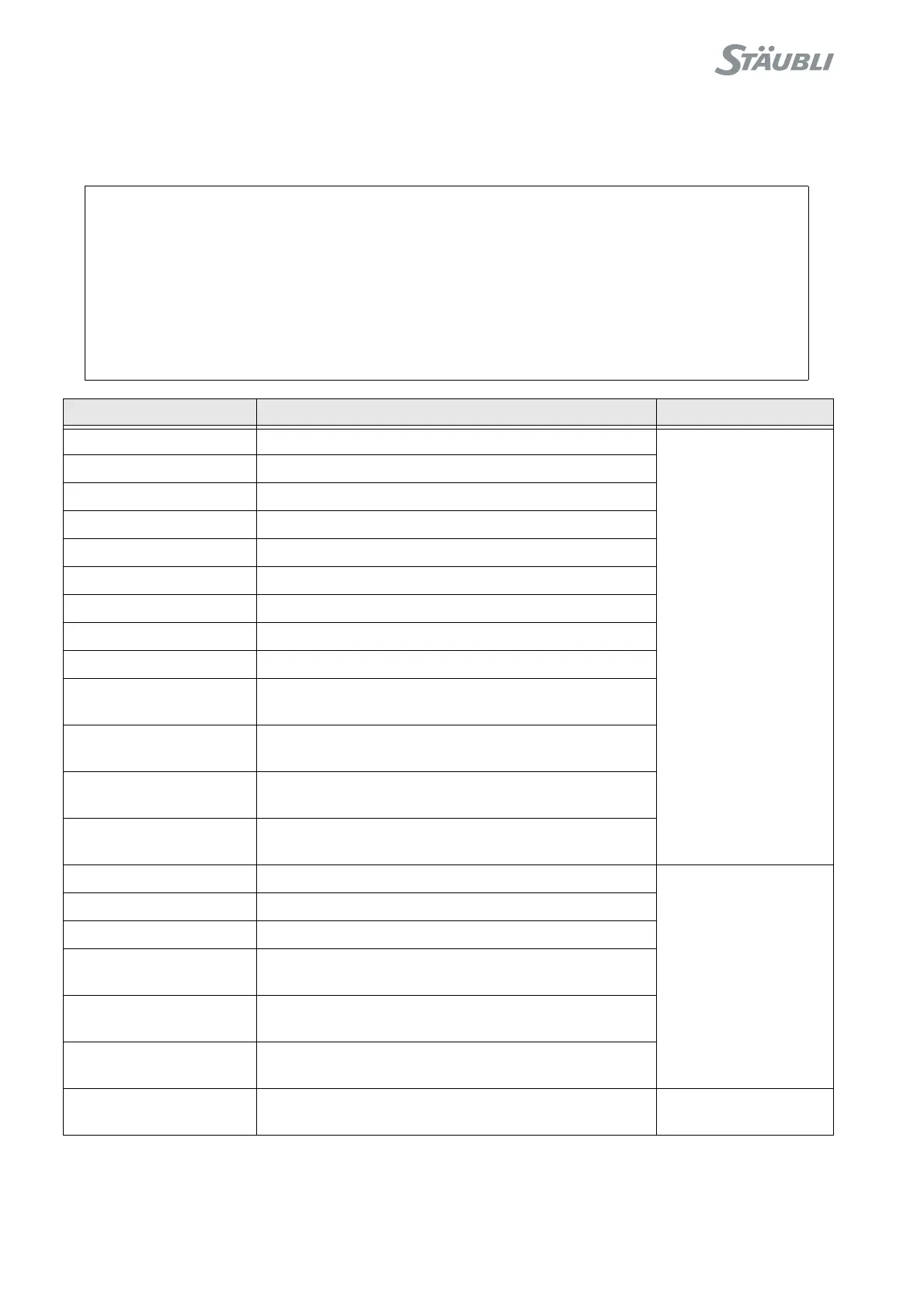
Key word Description Type
remoteEnablePower Signal for manual connection to the power supply
Digital input
remoteTestMode Signal for activation of the test mode
remoteManualMode Signal for activation of the manual mode
remoteLocalMode Signal for activation of the local mode
remoteRemoteMode Signal for activation of the remote mode
remoteDeadman1 Signal from the enable button (1/2)
remoteDeadman2 Signal from the enable button (2/2)
remotePark1 Signal showing presence on the holder (1/2)
remotePark2 Signal showing presence on the holder (2/2)
remoteJogJointMode Signal showing activation of the "Joint" mode for
manual movement
remoteJogFrameMode Signal showing activation of the "Frame" mode for
manual movement
remoteJogToolMode Signal showing activation of the "Tool" mode for
manual movement
remoteJogUserMode Signal showing activation of the "User" mode for
manual movement
remoteJogMove1 Speed of manual movement along the 1 or X axis
Analog input
[-100, +100]
remoteJogMove2 Speed of manual movement along the 2 or Y axis
remoteJogMove3 Speed of manual movement along the 3 or Z axis
remoteJogMove4 Speed of manual movement along the 4 axis or in RX
rotation
remoteJogMove5 Speed of manual movement along the 5 axis or in RY
rotation
remoteJogMove6 Speed of manual movement along the 6 axis or in RZ
rotation
remoteSpeedLimit Signal for incrementation of the maximum speed
authorized in test mode
Digital input