CS8C © Stäubli 2009 – D28070504A
125 / 248
Chapter 6 - Operation
6.3. ARM POWER-UP
Under normal operating conditions, the operating method is as follows:
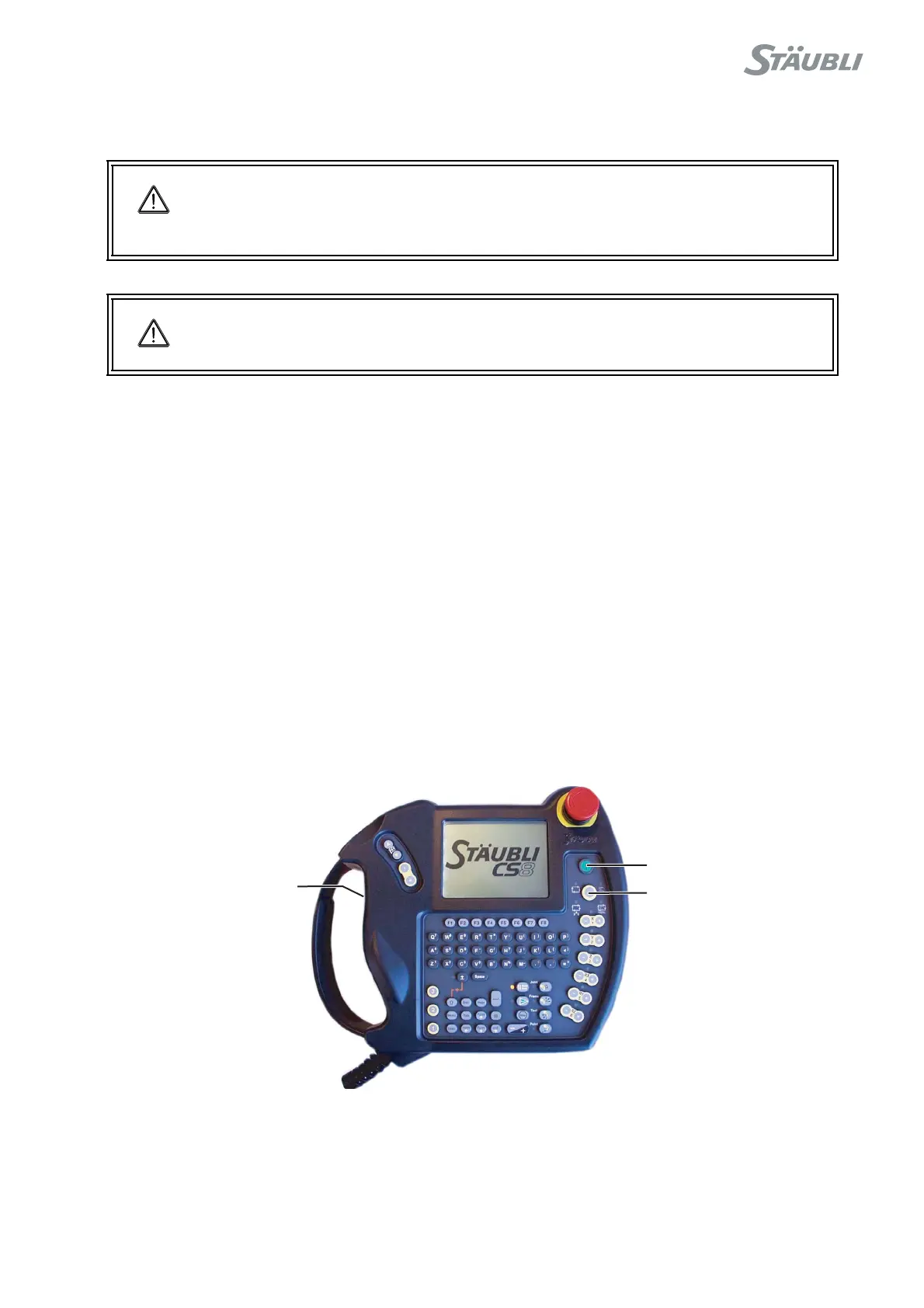
Select the Manual Mode from the WMS front panel. The selected mode is displayed on WMS front panel and on
the MCP (1).
(see paragraph 6.2.1)
Press button (3) to switch the arm power on. This action is taken into account if the enable button (2) has been
put into its middle position in the last 15 seconds or if the MCP has been placed on its holder in the last 15 seconds.
If it is not possible to switch the arm power on, because the enable button was pressed more than 15 seconds
previously, it is necessary to release it and then press it again.
If it is not possible to switch the arm power on because the MCP has been on its holder for more than 15 seconds,
it is necessary to remove it and then put it back on its holder.
The button indicator light flashes for a few seconds and then comes on steadily; this means that the arm power
has now been switched on and it is ready to carry out movements.
Press the button (3) again to switch the arm power off and apply the brakes. It is then necessary to repeat the
procedure for switching the arm power on to make movements possible.
The power is also cut off if the enable button is released, if the MCP is removed from its holder, or if WMS key
position is changed (working mode changed).
Figure 6.7
DANGER:
Before powering up the arm, make sure that the cell is completely free from
obstructions and that there is no one within the work area of the robot. When power is
switched on, the robot arm is liable to follow unforeseen trajectories.
DANGER:
Each time the arm is powered on, keep one hand close to the "Emergency stop" button
in order to be able to press it as quickly as possible in the event of a problem.
3
1
2