© Stäubli 2009 – D28070504A CS8C150 / 248
6.11. TEACHING FRAMES
This paragraph constitutes a frame teaching procedure using the three-point method.
This method enables you to define the orientation of the new frame in a precise way by recording three points:
• The frame origin (O)
• A point (Ox) located on the X axis of the frame on the positive x side
• A point (Oxy) on the plane formed by the X and Y axis on the positive y side
The method used is as follows:
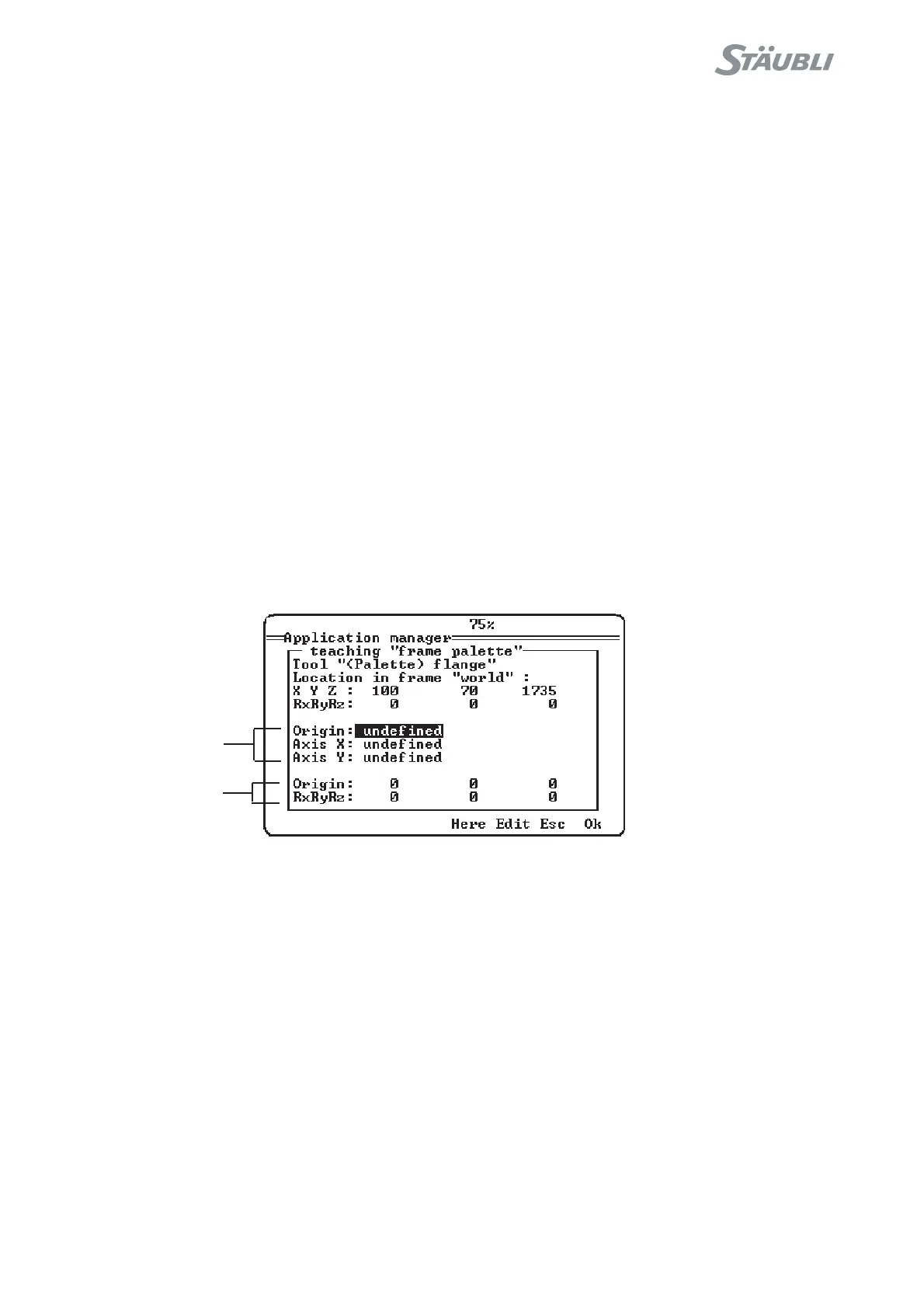
• After creating a new Frame type data, use the Teac key in the menu to call up a "Teaching" display (see
figure 6.19).
• Position the point of the robot tool at the desired point of origin using jog interfaces and press the Here key in
the pop-up menu.
• Repeat the operation for "X axis" and "Y axis" and then validate the orientation of the new frame (1).
• Save the modifications.
The frame coordinates are displayed in the box (2).
The point values and marker orientations can be modified using the Edit menu.
Figure 6.19
1
2