CS8C © Stäubli 2009 – D28070504A
131 / 248
Chapter 6 - Operation
6.7. JOG INTERFACE
6.7.1. PRESENTATION
The jog interface is a utility dedicated to the manual control of robot movements and the teaching of robot
positions.
When arm power is disabled, the jog interface can be accessed by pressing a movement mode selection key
(Joint, Frame, Tool or Point), whatever the current robot working mode. When arm power is enabled, the jog
interface can be accessed with the same keys, but only in manual mode.
The jog interface displays the context of the movement under manual control. This context is important to avoid
unexpected movements. Therefore when the jog interface is exited, the movement mode is also reset
automatically. It is however possible to exit the jog interface while keeping the movement mode active by pressing
Shift-Esc.
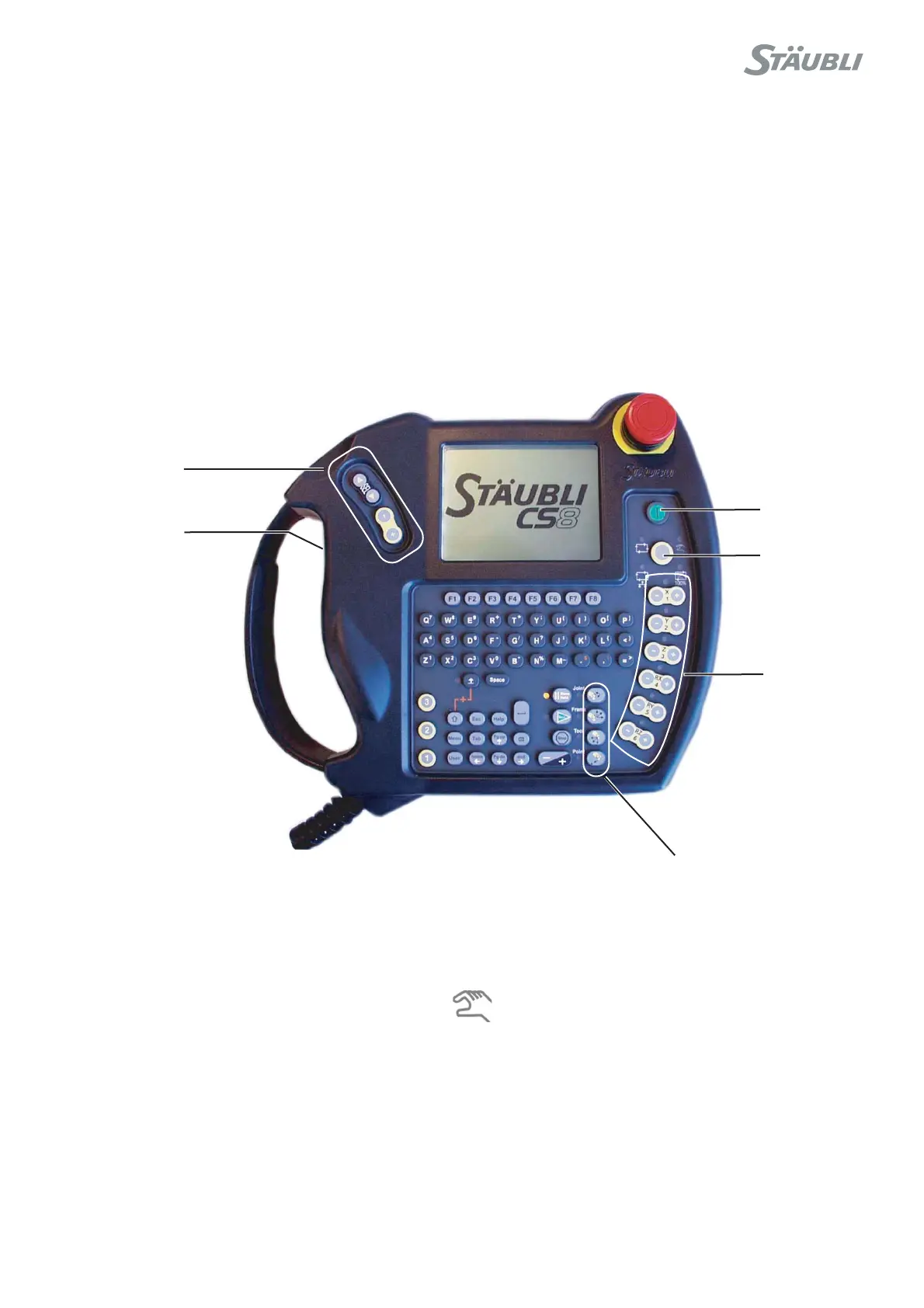
Figure 6.8
• To select manual mode, turn the 3 position keyswitch to the appropriate position. The selected mode is indicated
both on WMS front panel and on MCP (1).
Manual mode icon
• Carry out the procedures for switching on power in manual mode (see paragraph 6.3).
• Select the movement mode (Joint, Frame, Tool, or Point) ; the corresponding indicator light (4) comes on.
• Press one of the movement keys (5 or 6) or, in Point mode, press the Move / Hold key.
Note:
In manual mode, the speed of movement is limited to 250 mm/s.
3
1
5
4
6
2