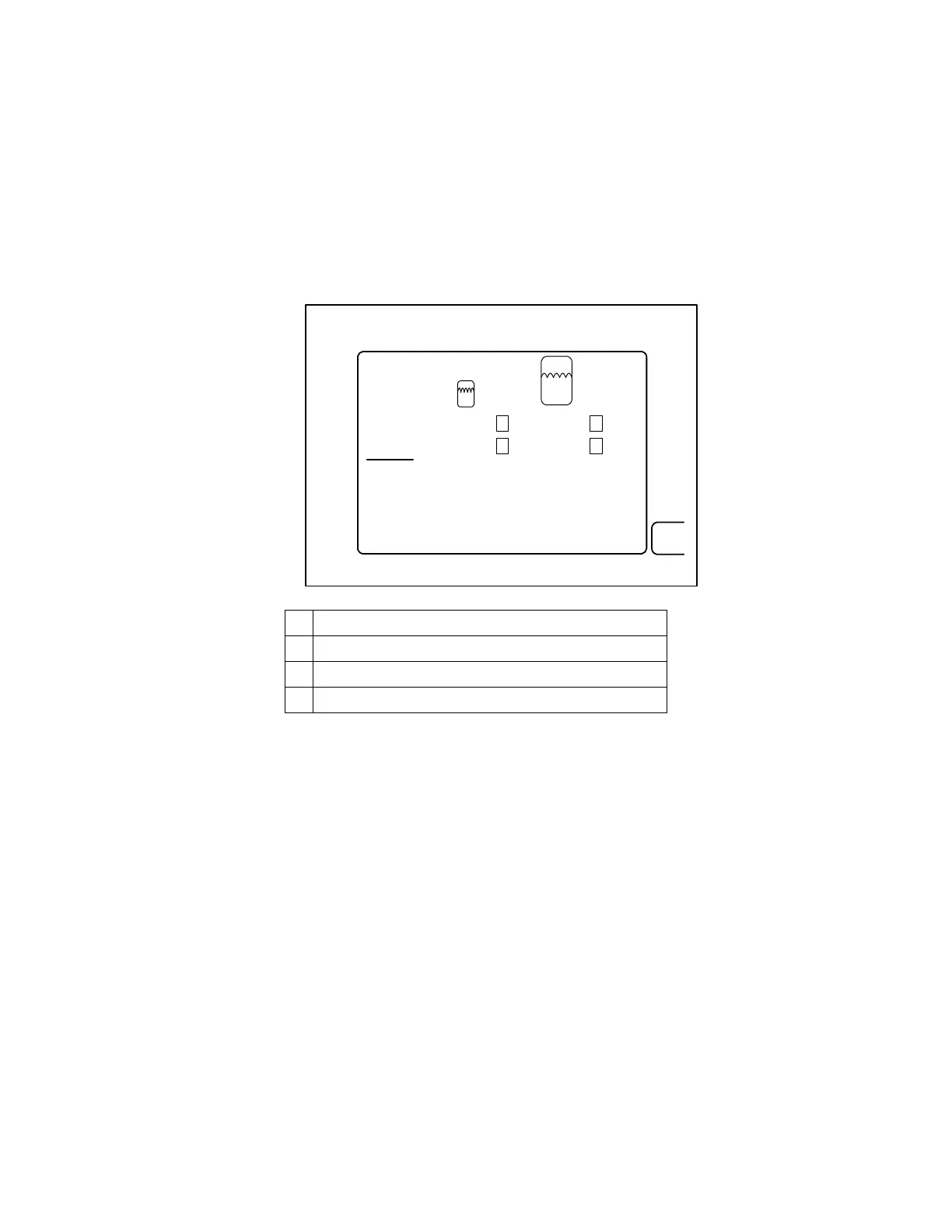
Once a response comes back, that value is displayed in the level sensor data
screen. The value will be a hexadecimal figure representing the physical location of
each magnet. (See Figure 2) The first value will be received from the small tank’s float
sensor, since it is the closest to the top of the transducer rod. Next the signal from the
small canister reference magnet will be received, followed by the signal from the large
canister’s float sensor. Finally, the signal from the large tank’s reference magnet will be
received. Under normal operation the values will be placed as shown in figure 2.
ESC
FLOAT
LEVEL SENSOR DATA
REF
1F341
192B8
06089DIFF
VOLUME 00445
APP
35D40
3CF40
07200
01071
B
C
D
E
B Response From Small Tank Float Sensor
C Response From Small Tank Reference Magnet
D Response From Large Tank Float Sensor
E Response From Large Tank Reference Magnet
Figure 2. Response Time Values For Level Sensor
Each magnet has a number range that it should fall between. (Especially the
reference magnets since they do not move) The software does not compare the actual
returned values to make sure they are within an expected returned value range. It
simply takes the first response and assumes the value is the response for the small
canister’s float sensor [B]. Likewise, the second response is automatically assumed to
be the response for the small canister’s reference magnet [C]. Therefore, if only one
magnet has failed, the remaining three responses will be entered as if they were the
expected first three. The data for the fourth response will be missing. (It was placed in
the 3
rd
slot) Consequently, the large tank’s reference magnet’s slot will display all zeros.
Figure 3 illustrates the expected value range for all four magnets, while Figure 4 is an
example of what the level sensor data screen will display when a magnet has failed.
6-36

 Loading...
Loading...