311
※1
:
If users have no experience, please use the default value 10, set PID sampling time
(control period) to be 0msthen start the auto tune.
PID auto tune overshooting permission setting [S3+13]
If set 0, overshooting is permitted, and the system can study the optimal PID
parameters all the time. But in auto tune process, detected value may be lower or higher than
the target value, safety factor should be considered here.
If set 1, overshooting is not permitted. For these objectives which have strict safety demand
such as pressure vessel. Set [S3+13] to be 1 to prevent from tested value over the target value
seriously.
In the process, if [S3+2] bit8 changes from 0 to 1, it means the auto tune is successful and the
optimal parameters are got; if [S3+2] bit8 keeps 0, when [S3+2] bit7 changes from 1 to 0, it
means auto tune is finished, but the parameters are not the best and they need to be modified
by hand.
Every adjustment percent of current target value in auto tune end transition stage
[S3+14]
This parameter is effective only when [S3+13] is 1.
If doing PID control after auto tune, small range of overshooting may be occurred. It is better
to decrease this parameter to control the overshooting. But response delay may occur if this
value is too small. The defaulted value is 100% which means the parameter is not effective.
The recommended range is 50~80%.
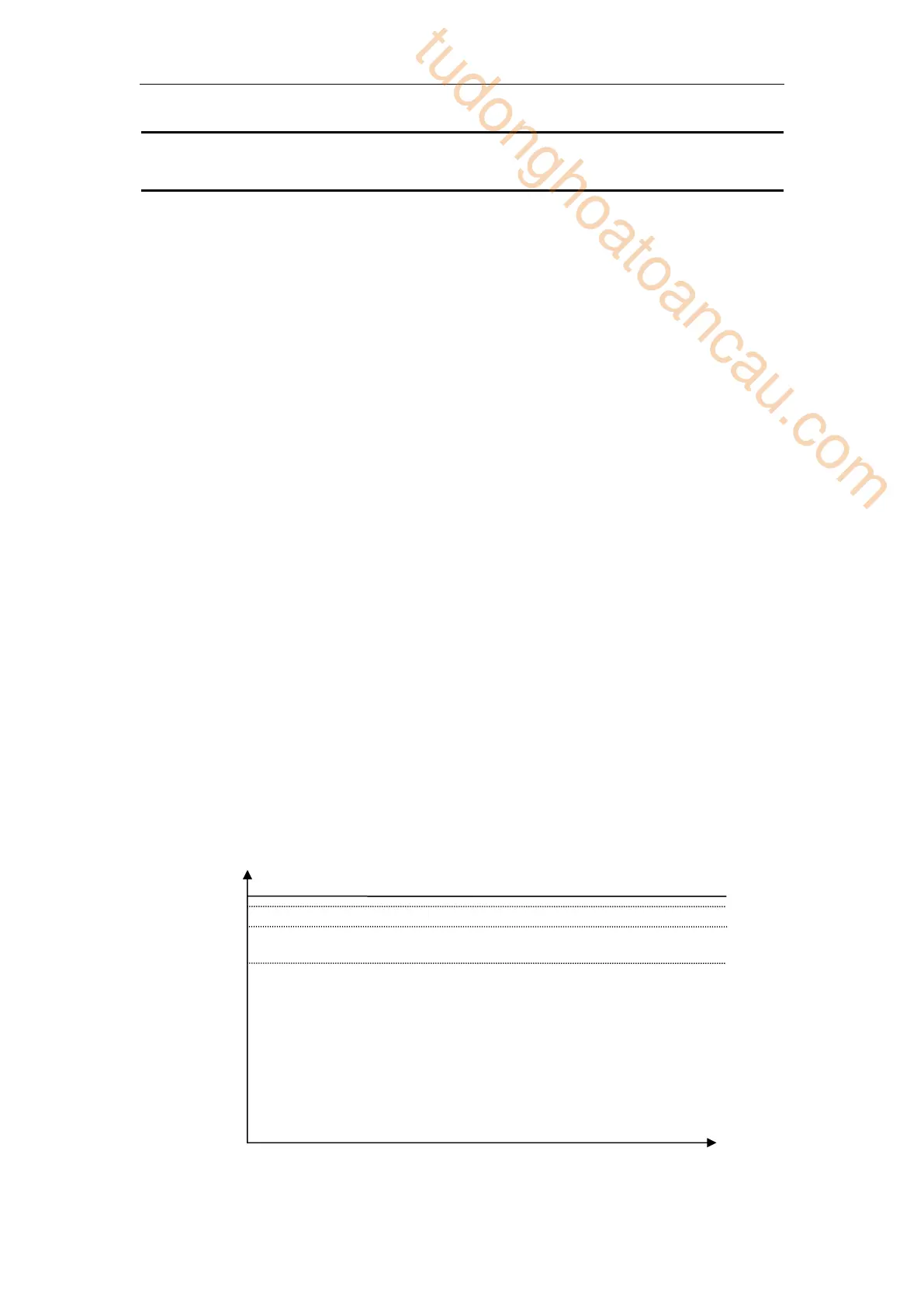
Cutline Explanation:
Current target value adjustment percent is 2/3(S3 + 14 = 67%), the original temperature of the
system is 0 ºC, target temperature is 100 ºC, and the current target temperature adjustment
situation is shown as below:
Next current target value = current target value + (final target value – current target value) ×
2/3;
So the changing sequence of current target is 66 ºC, 88 ºC, 96 ºC, 98 ºC, 99 ºC, 100 ºC.
tudonghoatoancau.com
 Loading...
Loading...