313
7-6 Application outlines
Under the circumstances of continuous output, the system whose effect ability will die down
with the change of the feedback value can do auto tune, such as temperature or pressure. It is
not suitable for flux or liquid level.
Under the condition of overshooting permission, the system will get the optimal PID
parameters from auto tuning.
Under the condition that overshoot not allowed, the PID parameters got from auto tune is up
to the target value, it means that different target value will produce different PID parameters
which are not the optimal parameters of the system and for reference only.
If the auto tune is not available, users can set the PID parameters according to practical
experience. Users need to modify the parameters when debugging. Below are some
experience values of the control system for your reference:
7-7 Application
Example 1:
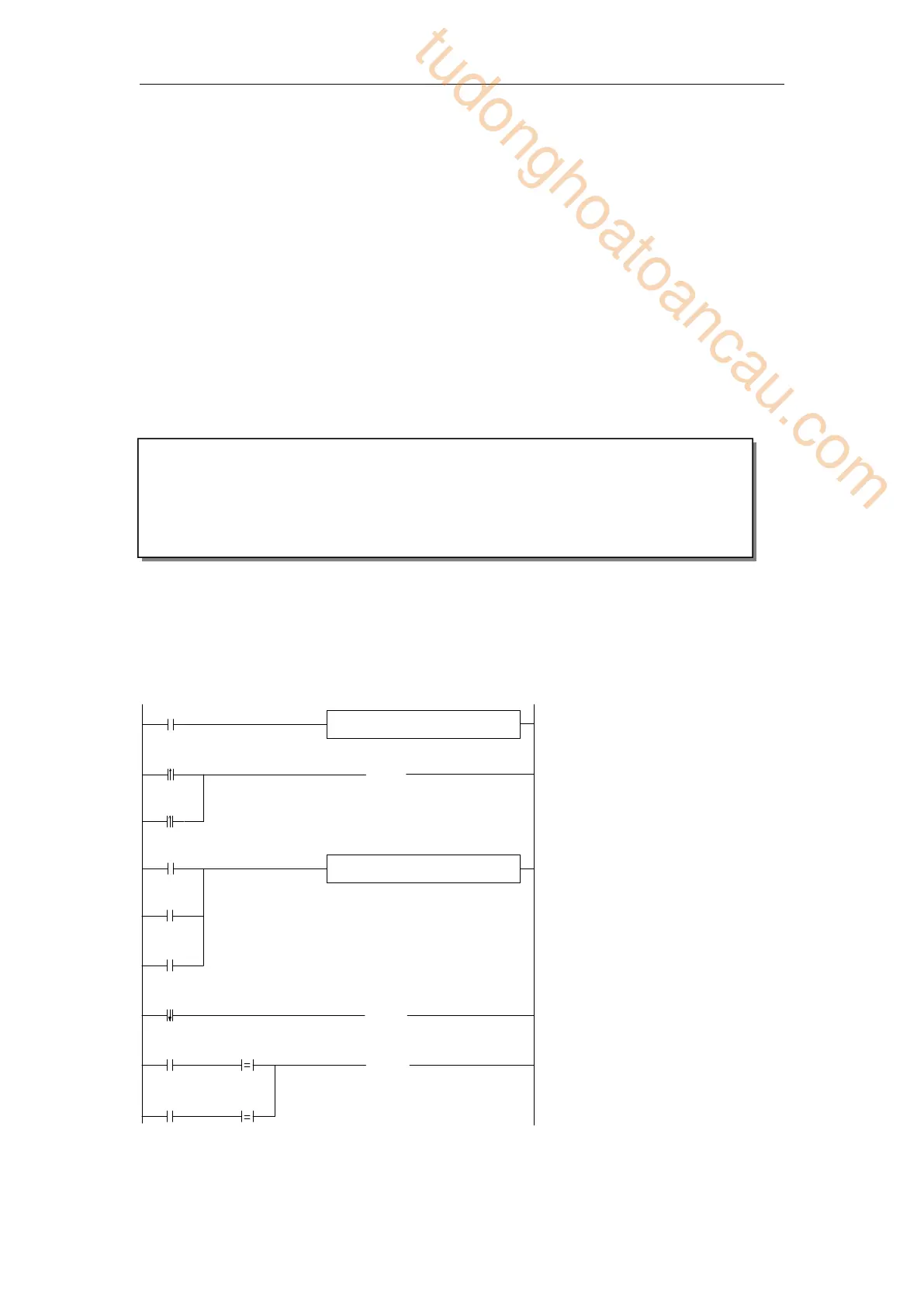
PID control program is shown below:
MOV ID100 D10
SM0
M1
M2
( S )
HD2.7
M0
PID D0 D10 HD0 Y0
M1
M2
M2
( R )
HD2.7
HD2.8 HD09
( R )
M1
HD2.8
K0
HD09 K1
Temperature system: P (%) 2000 ~ 6000, I (minutes) 3 ~ 10, D (minutes) 0.5 ~ 3
Flux system: P (%) 4000 ~ 10000, I (minutes) 0.1 ~ 1
Pressure system: P (%) 3000 ~ 7000, I (minutes) 0.4 ~ 3
Liquid level system: P (%) 2000 ~ 8000, I (minute) 1 ~ 5
// Move ID100 content into D10
// auto tune mode, or set to autotune mode
after auto tune end
// start PID, D0 is target value, D10 is the
measured value, from HD0 is PID
parameters area; output PID result byY0
// PID control finish, close auto tune PID
mode
// if auto tune is successful, and overshoot is
permitted, close auto tune control bit, auto
tune will finish;
If auto tune turns to be manual mode, and
overshoot is not permitted, close auto
tune control bit.
tudonghoatoancau.com
 Loading...
Loading...