Setting 1A: During reverse
A digital output set for “During reverse” will close whenever the drive is running the motor in the reverse direction.
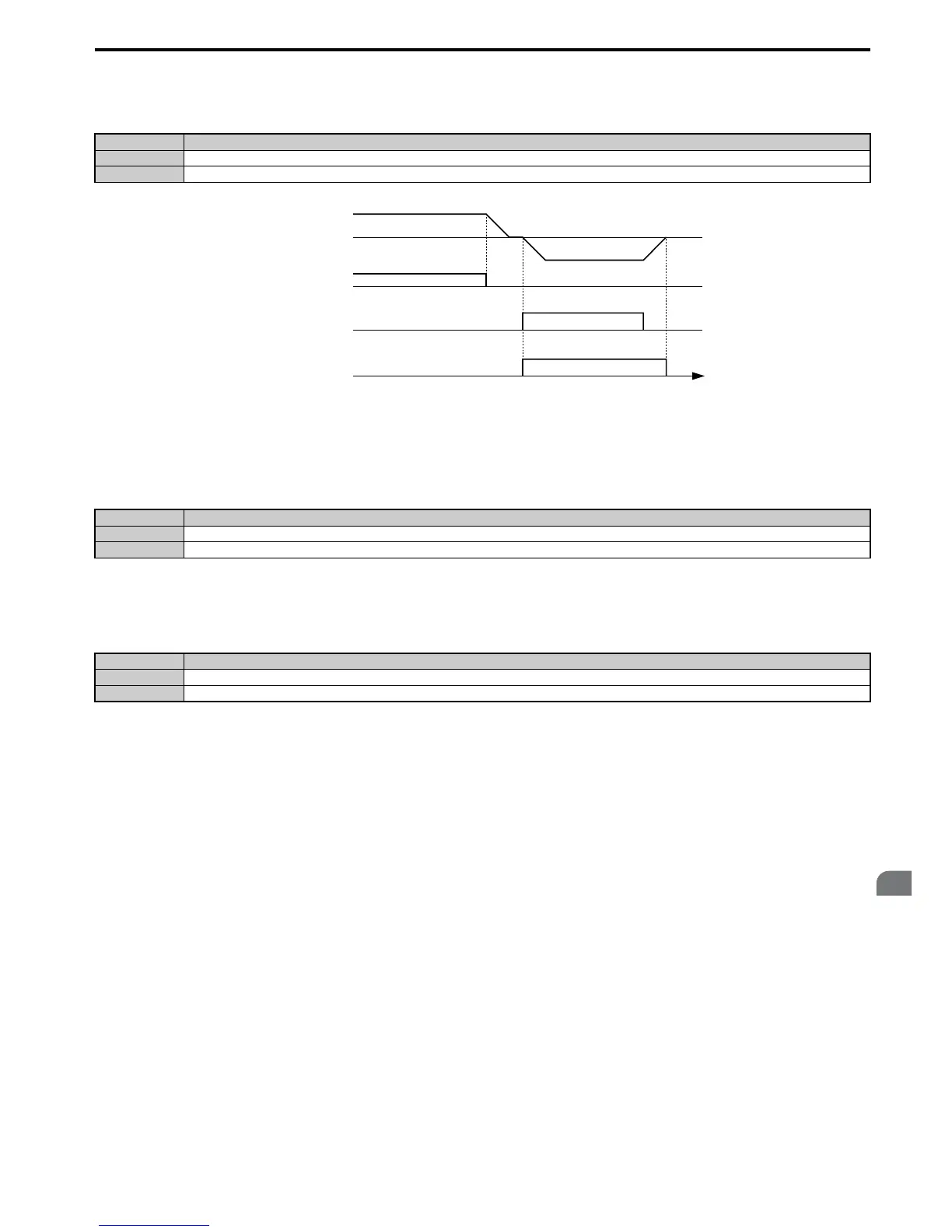
Figure 5.75
Figure 5.75 Reverse Direction Output Example Time Chart
Setting 1B: During baseblock (N.C.)
Output opens to indicate that the drive is in a baseblock state. While Baseblock is executed, output transistors do not
switch and no main circuit voltage is output.
Setting 1C: Motor 2 selection
Indicates which motor is selected when another output terminal is set up to switch drive operation between two motors
(H1- = 16). Refer to Setting 16: Motor 2 selection on page 219 for details on switching motors.
Setting 1D: During regeneration
Terminal closes when the motor is driven in the regenerative mode.
Setting 1E: Restart enabled
An output set for “Restart enabled” closes once the drive begins attempting to restart after a fault has occurred.
The fault restart function allows the drive to automatically clear a fault. The terminal set to 1E will close after the fault is
cleared and the drive has begun attempting to restart. If the drive cannot successfully restart within the number of
attempts permitted by L5-01, then a fault will be triggered and the terminal set to 1E will open. Refer to L5: Fault
Restart on page 263 for details on automatic restart.
Setting 1F: Motor overload alarm (oL1)
An output programmed for this function will close when the motor overload level estimated by the oL1 fault detection
exceeds 90% of the oL1 detection level. Refer to L1-01: Motor Overload Protection Selection on page 244.
Setting 20: Drive overheat pre-alarm (oH)
Output closes whenever the drive heatsink temperature reaches the level specified by parameter L8-02. Refer to L8-02:
Overheat Alarm Level on page 269 for details on drive overheat detection.
Setting 22: Mechanical weakening detection
Output closes when a mechanical weakening situation is detected. Refer to Mechanical Weakening Detection on
page 266 for details.
Status Description
Open Motor is being driven in the forward direction or stopped.
Closed Motor is being driven in reverse.
Status Description
Open Baseblock is being executed.
Closed Drive is not in a baseblock state.
Status Description
Open Motor 1 is selected.
Closed Motor 2 is selected.
Output frequency
time
FWD Run command
REV Run command
During Reverse
OFF
ON

 Loading...
Loading...












