5.7 H: Terminal Functions
238 YASKAWA ELECTRIC SIEP C710616 27C YASKAWA AC Drive A1000 Technical Manual
Setting 3: Auxiliary reference 2
Sets the auxiliary frequency reference 2 when multi-step speed operation is selected. Refer to Multi-Step Speed
Selection on page 180 for details.
Setting 4: Output voltage bias
Voltage bias boosts the output voltage of the V/f curve as a percentage of the maximum output voltage (E1-05). Available
only when using V/f Control.
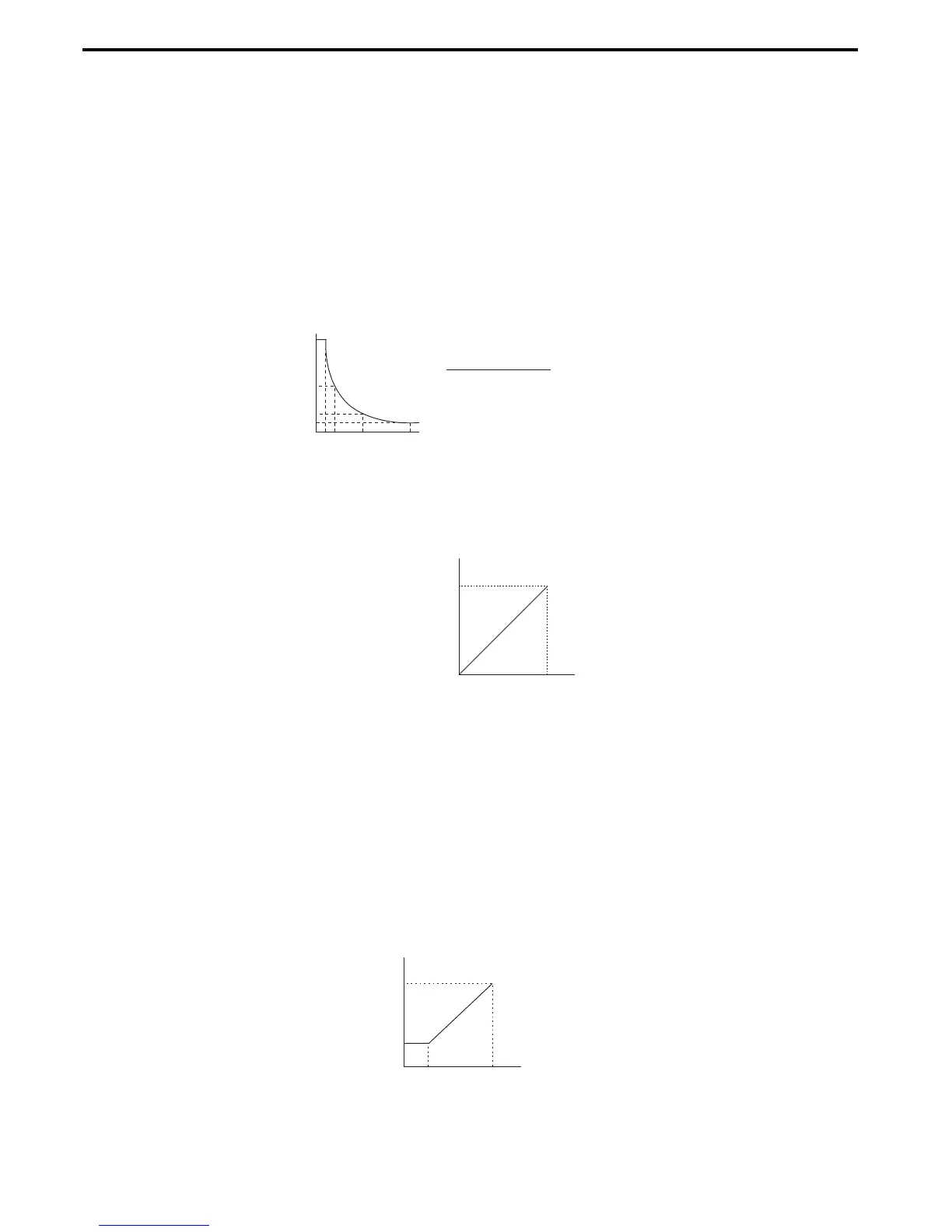
Setting 5: Accel/decel time gain
Adjusts the gain level for the acceleration and deceleration times set to parameters C1-01 through C1-08.
The acceleration time used by the drive is calculated by multiplying the this gain level to C1- as follows:
C1- ×
Accel/decel time gain = Drive accel/decel time
Figure 5. 80
Figure 5.80 Accel/Decel Time Gain with Analog Input Terminal
Setting 6: DC Injection Braking current
The current level used for DC Injection Braking. Set as a percentage of the maximum output current using.
Figure 5. 81
Figure 5.81 DC Injection Braking Current Using an Analog Input Terminal
Setting 7: Torque Detection level
Using this setting, the overtorque/undertorque detection level for torque detection 1 (L6-01) can be set by an analog
input. The analog input will replace the level set to L6-02. An analog input of 100% (10 V or 20 mA) will set a torque
detection level equal to 100% drive rated current / motor rated torque. Adjust the analog input gain if higher detection
level settings are required. Refer to L6: Torque Detection on page 264 for details on torque detection.
Setting 8: Stall Prevention level
This setting allows an analog input signal to adjust the Stall Prevention level. Figure 5.82 shows the setting
characteristics. The drive will use either the Stall Prevention level set to L3-06 or the level coming from the analog input
terminal that has been selected, whichever value is lower.
Figure 5. 82
Figure 5.82 Stall Prevention During Run Using an Analog Input Terminal

 Loading...
Loading...












