7 System Diagnosis
DX100 7.9 Servo Monitoring
7-24
7.9 Servo Monitoring
7.9.1 Servo Monitor Window
The servo monitor window shows the servo-related data of each axis.
7.9.1.1 Changing the Monitor Items
1. Set the security mode to the management mode.
2. Select {ROBOT} under the main menu.
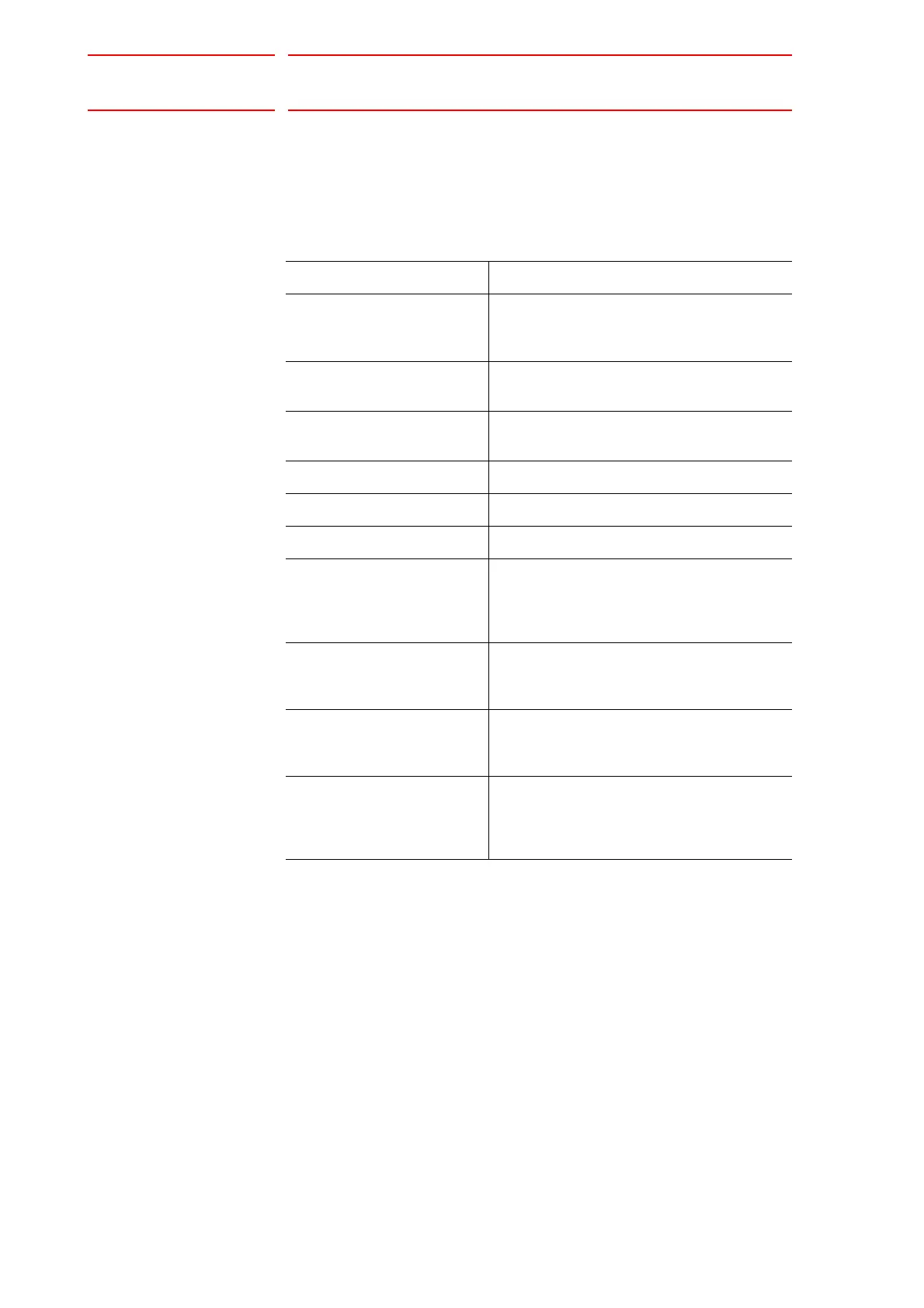
Monitor Items Description
FEEDBACK PULSE Feedback position (actual position) of each
axis
“0” at the home position
ERROR PULSE Difference between the command position
and the feedback position of each axis
SPEED DEVIATION Difference between the command speed and
the feedback speed of each axis
SPEED INST Speed reference of each axis
FEEDBACK SPEED Feedback speed (actual speed) of each axis
TORQUE SPEC Torque reference of each axis
MAX. TORQUE Keeps the maximum value of the torque
reference of each axis.
“0” when the maximum torque is cleared or
the control power supply is turned ON or OFF
ENCODER ROTATE SUM Accumulated number of encoder rotation
when the control power supply of each axis is
turned ON
IN 1 TURN POSITION Position after one rotation of the encoder
when the control power supply of each axis is
turned ON
MOTOR ABSOLUTE Absolute value of the motor is calculated by
adding the position in one rotation to the sum
of the accumulated rotations when the control
power supply of each axis is turned ON.

 Loading...
Loading...









