6 Operations After Replacing Parts
DX100 6.4 Setting the Second Home Position (Check Point)
6-18
6.4.3 Procedure after the Alarm
If the "OUT OF RANGE (ABSO DATA)" alarm occurs, perform the
followings
• Reset the alarm
• Turn Servo power ON
and confirm the second home position. After the confirmation, if the PG
system is found to be the cause of the alarm, perform the necessary
operation, such as replacing the PG, etc.
The robot current position data when turning main power supply OFF and
ON can be confirmed in “POWER ON/OFF POS" window.
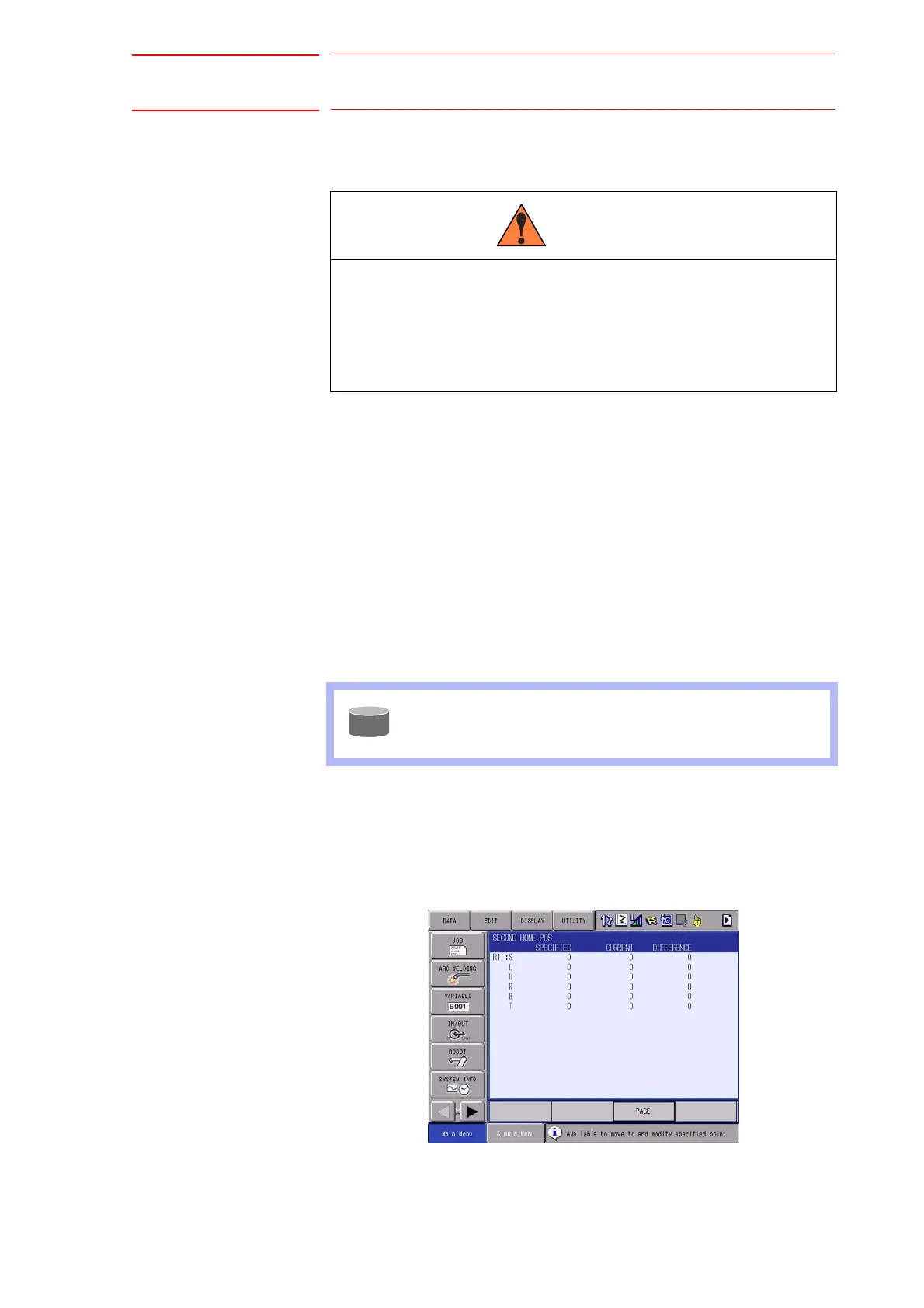
1. Select {ROBOT} under the main menu.
2. Select {SECOND HOME POS}.
– The SECOND HOME POS window appears.
WARNING
• Be aware of safety hazards when performing the position
confirmation of the specified point.
Abnormality of the PG system may be cause for alarm. The
manipulator may operate in an unexpected manner, and there is
a risk of damage to equipment or injury to personnel.
SUPPLE
-MENT
Refer tochapter 7.7 “Position Data When Power is
Turned ON/OFF” at page 7-22 for details on the
“POWER ON/OFF POS" window.

 Loading...
Loading...









