5.4 Settings That Must Be Adjusted to the System
5.4.2 Electronic Gear Settings
5-24
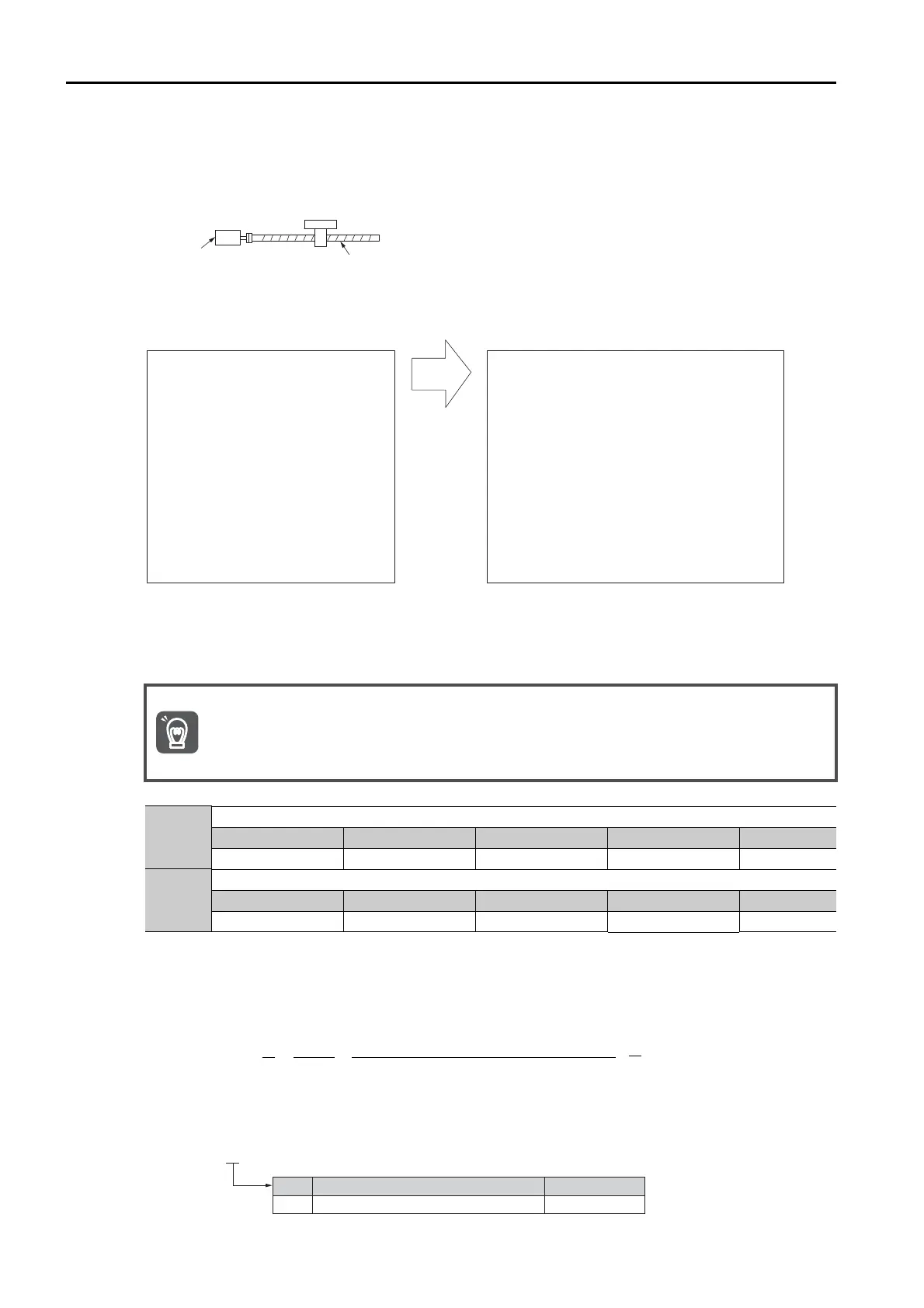
The difference between using and not using the electronic gear is shown below.
In this example, the following machine configuration is used to move the workpiece 10 mm.
Electronic Gear Ratio Settings
Set the electronic gear ratio using Pn20E and Pn210.
Calculating the Settings for the Electronic Gear Ratio
If the gear ratio between the Servomotor shaft and the load is given as n/m, where n is the
number of load rotations for m Servomotor shaft rotations, the settings for the electronic gear
ratio can be calculated as follows:
Encoder Resolution
You can check the encoder resolution in the Servomotor model number.
Set the electronic gear ratio within the following range.
0.01 ≤ Electronic gear ratio (B/A) ≤ 100
If the electronic gear ratio is outside of this range, an A.040 alarm (Parameter Setting Error) will
occur.
Pn20E
Electronic Gear Ratio (Numerator)
Setting Range Setting Unit Default Setting When Enabled Classification
1 to 65,535 1 1 After restart Setup
Pn210
Electronic Gear Ratio (Denominator)
Setting Range Setting Unit Default Setting When Enabled Classification
1 to 65,535 1 1 After restart Setup
Ball screw lead:
6 mm
Workpiece
Resolution:
1,024 (10 bits)
If you do not use the electronic gear,
you must calculate the number of
reference pulses for each reference.
If you use the electronic gear, it is not necessary
to calculate the number of reference pulses for
each reference.
To move a workpiece 10 mm:
Calculate the number of revolu-
tions.
The motor will move 6 mm for each
revolution, so 10/6 revolutions are
required to move 10 mm.
Calculate the required number of
reference pulses.
One revolution is 1,024 pulses,
therefore
10/6 × 1,024 = 1,706.66 pulses.
Input 1,707 pulses as the refer-
ence.
If you use reference units to move the work-
piece when one reference unit is set to 20
μm, the travel distance is 20 μm per pulse.
To move the workpiece 10 mm (10,000
μm), 10,000 ÷ 20 = 500 pulses, so 500
pulses would be input.
==
×
B
A
Pn20E
Pn210
m
n
Electronic gear ratio
Encoder resolution
Travel distance per load shaft revolution (reference units)
SGMSL -
Code Specication Encoder Resolution
K 10-bit incremental encoder
1,024
 Loading...
Loading...






