6.4 Convenient Function to Use during Trial Operation
6.4.1 Program Jog Operation
6-6
6.4
Convenient Function to Use during Trial Operation
This section describes some convenient operations that you can use during trial operation.
Use them as required.
6.4.1
Program Jog Operation
Program jog operation is performed with commands from the SigmaWin+ without using com-
mands from the host controller. The Servomotor is moved with programmed operation using
operation patterns (travel distances, movement speeds, acceleration/deceleration times, wait
times, and numbers of movements) that are preset in parameters.
Program jog operation is used in the same way as normal jog operation, i.e., to check Servo-
motor operation and for simple positioning operations.
Preparations
Confirm the following conditions before you perform program jog operation.
• The parameters must not be write prohibited.
• The power supply must be ON.
• There must be no alarms.
• The system must be in the SERVO OFF state.
• Emergency stop status must not exist.
• The motor code of the Servomotor to use must be set in Pn08A (Motor Selection Switch).
• The range of machine motion and the safe movement speed of your machine must be con-
sidered when you set the travel distance and movement speed.
Additional Information
You can use the functions that are applicable to position control.
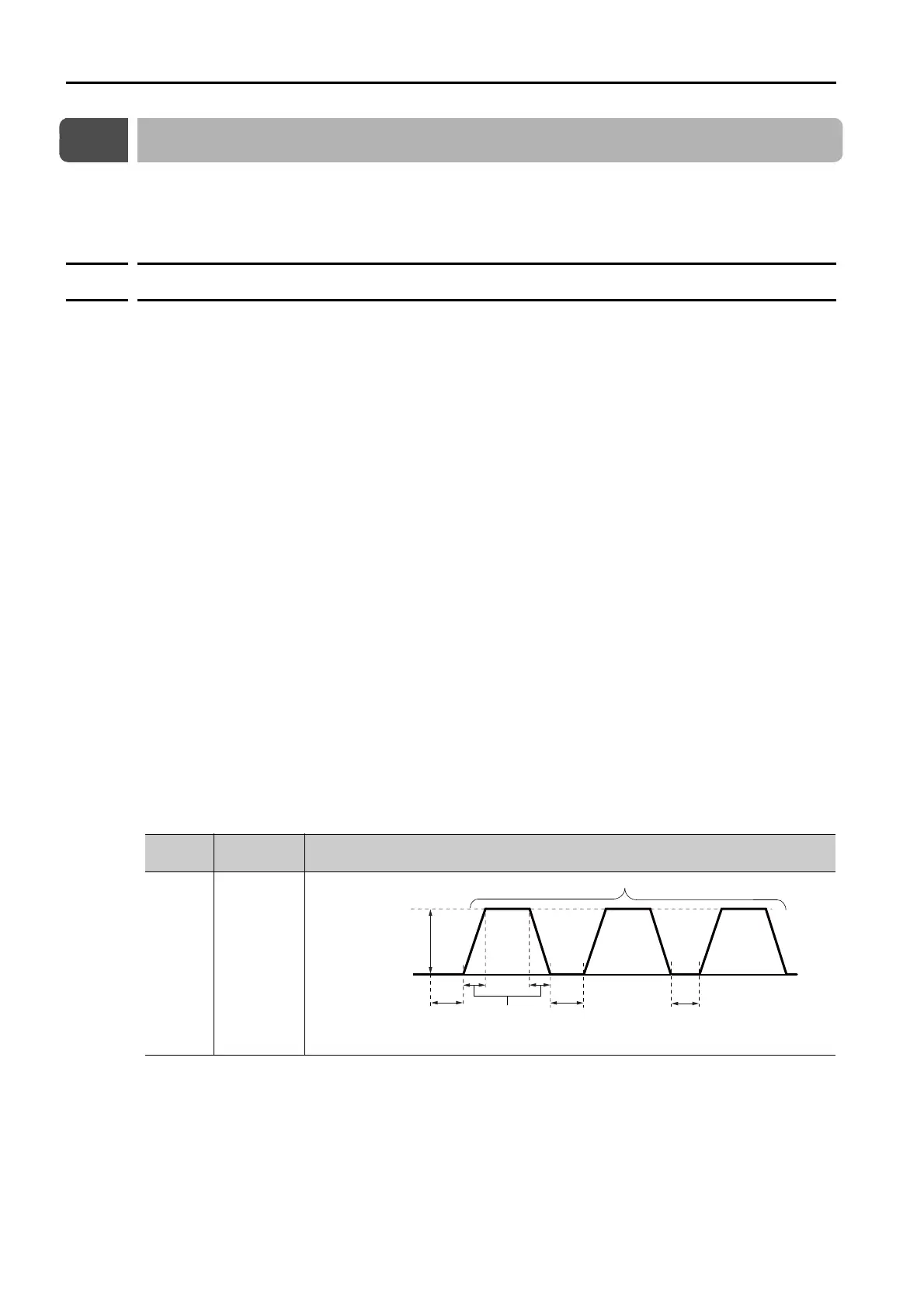
Program Jog Operation Pattern
An example of a program jog operation pattern is given below. In this example, the Servomotor
direction is set to Pn000 = n.0 (Use CCW as the forward direction).
Setting
of Pn530
Setting Operation Pattern
n.
0
(Waiting time
→ Forward
travel dis-
tance) ×
Number of
movements
Continued on next page.
Number of movements (Pn536)
Movement speed
(Pn533)
Speed 0
Waiting time
(Pn535)
Acceleration/
deceleration
time (Pn534)
Waiting time
(Pn535)
Waiting time
(Pn535)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
Travel
distance
(Pn531)
 Loading...
Loading...






