5.3 Sequence I/O Signals
5.3.1 Input Signals
5-10
5.3
Sequence I/O Signals
I/O signals for command communications with the host controller are allocated to the pins on
the I/O signal connector (CN1). These I/O signals are called sequence I/O signals.
This section describes the functions and meanings of the sequence I/O signals and the param-
eters that are used to allocate them to the pins on the I/O signal connector (CN1).
Refer to the following section for the default I/O signal allocations.
4.5 I/O Signal Connections on page 4-14
5.3.1
Input Signals
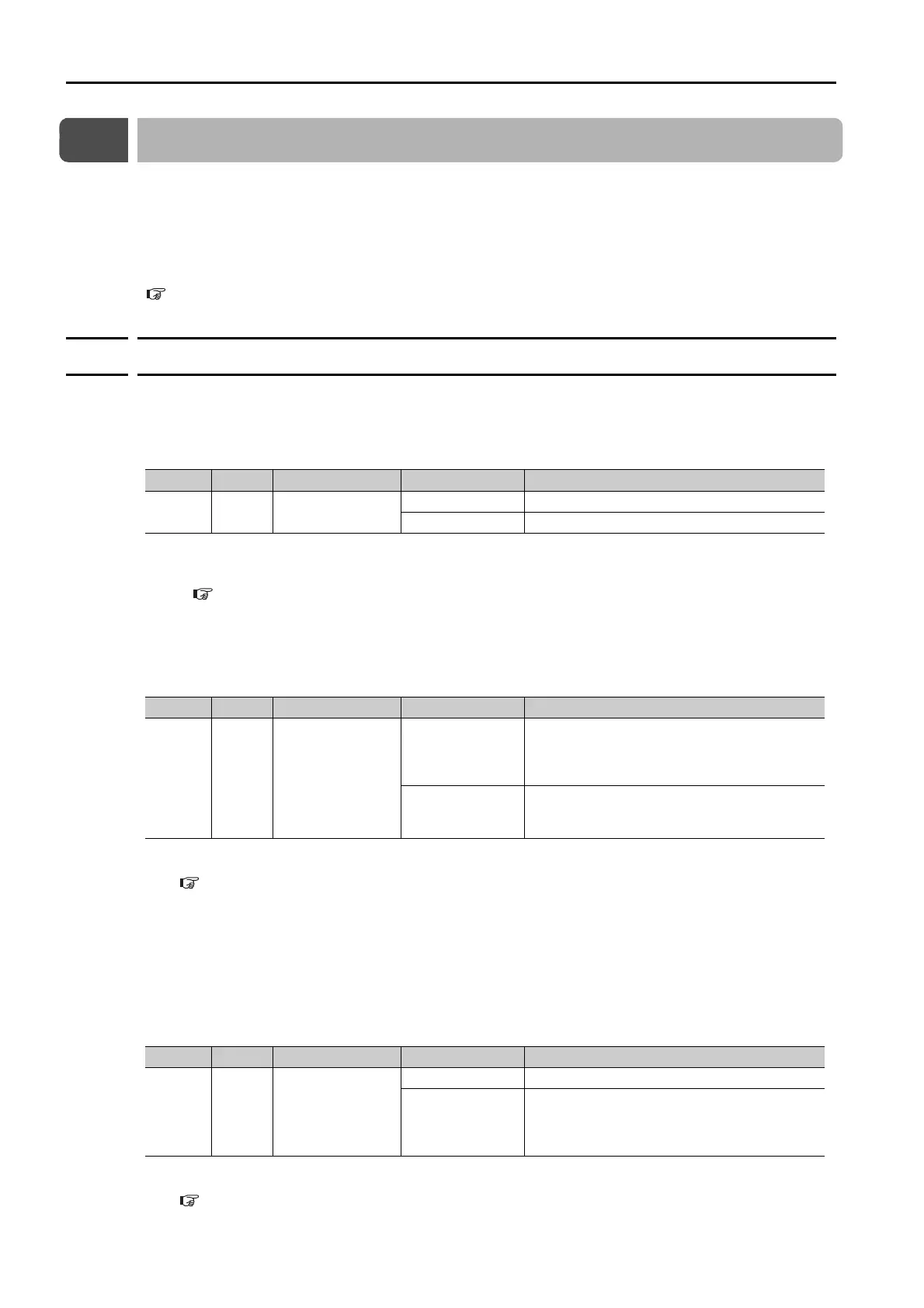
/MODE (Mode Switch Input) Signal
This signal changes the mode between mode 0 (Program Table Operation) and mode 1 (Jog
Speed Table Operation).
Note: 1. Homing is not affected by the setting of the /MODE (Mode Switch Input) signal.
2. Use PnBA0 = n.X (/MODE (Mode Switch Input) Signal Allocation) to allocate the /MODE signal to
another connector pin. Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/START (Program Table Operation Start Input) Signal
This signal starts operation for the program step that is specified by the /SEL0 to /SEL5 (Pro-
gram Step Selection Input) signals.
Note: Use PnBA1 = n.X (/START (Program Table Operation Start Input) Signal Allocation) to allocate the
/START signal to another connector pin. Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
/STOP (Program Table Operation Stop Input) Signal
If this signal is turned ON during program table operation, program table operation is inter-
rupted. If the Servomotor is operating, it is decelerated to a stop at the deceleration speed
(DEC) for the current program step.
If this signal is turned ON during homing, homing is canceled. If the Servomotor is operating, it
is decelerated according to the setting of PnB2B (Deceleration Rate).
Note: Use PnBA2 = n.X (/STOP (Program Table Operation Stop Input) Signal Allocation) to allocate the /STOP
signal to another connector pin. Refer to the following section for details.
5.3.3 Allocating Input Signals to Pins and Parameter Settings on page 5-18
Type Signal Pin Signal Status Meaning
Input /MODE 3 [default setting]
ON (closed) Mode 0 (Program Table Operation)
OFF (open) Mode 1 (Jog Speed Table Operation)
Type Signal Pin Signal Status Meaning
Input /START 4 [default setting]
ON (closed)
The setting of /SEL0 to /SEL5 (6-bit binary
number) is latched on the rising edge of the
signal and operation is started for the program
step with the latched number.
OFF (open)
The current status is maintained. Confirm that
the /BUSY signal has turned ON before you
turn OFF this signal.
Type Signal Pin Signal Status Meaning
Input /STOP 5 [default setting]
ON (closed) Program table operation stops.
OFF (open)
Program table operation does not stop. If pro-
gram table operation was stopped with the
/STOP signal, it starts again when the signal
turns OFF.
 Loading...
Loading...






