7.4 Jog Operation
7.4.1 Jog Speeds
7-43
7.4
Jog Operation
You can perform jog operation from the SigmaWin+, or you can use the /JOGP and /JOGN
input signals to perform jog operation. Jog operation is performed at the specified jog speed.
7.4.1
Jog Speeds
You set the jog speeds in the Jog Speed Table Editing Dialog Box on the SigmaWin+.
The specifications for the jog speeds are given in the following table.
Note: 1. You can set only one jog speed.
2. Edit the jog speed table only when the Servomotor is stopped.
7.4.2
I/O Signals Related to Jog Operation
Input Signals
The following signals are used for jog operation: /MODE, /JOGP, and /JOGN.
Turn OFF the /MODE signal to change to mode 1. Use the /JOGP signal as the command for
forward jog operation and the /JOGN signal as the command for reverse jog operation.
Output Signal
The /BUSY signal shows the status of the Servomotor during jog operation.
7.4.3
Setting the Jog Speeds
You register jog speeds in the Jog Speed Table Editing Dialog Box on the SigmaWin+.
When you register or edit jog speeds in the jog speed table, save the table to flash memory.
Refer to the following section for the procedure.
Saving the Program Table to Flash Memory in the SERVOPACK on page 7-31
If you turn OFF the power supply before you save changes to flash memory, the changes to the
jog speed table will be lost.
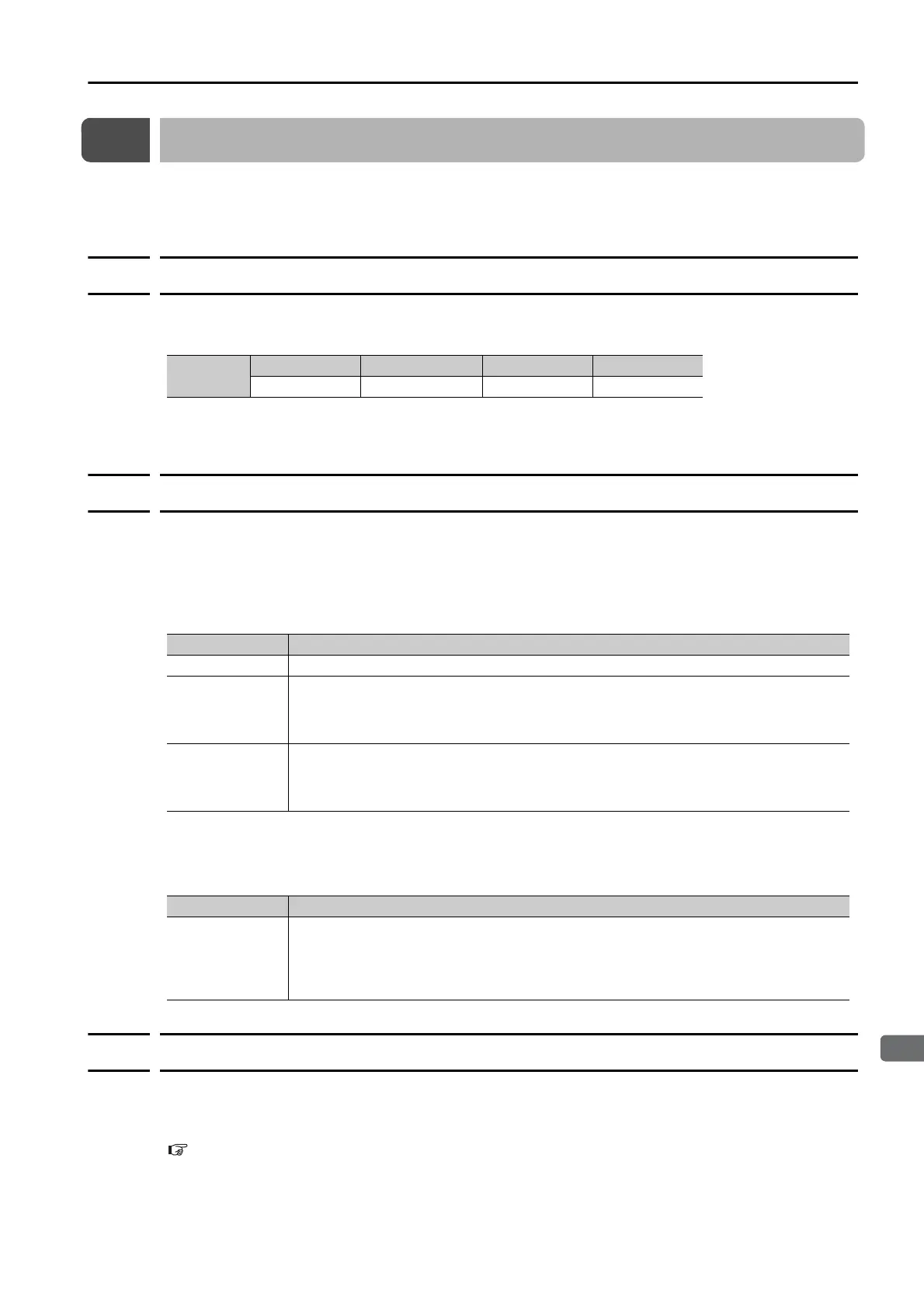
Jog Speed
Setting Range Setting Unit Default Setting When Enabled
1 to 99,999,999 Reference units/s 2,000 Immediately
Input Signal Description
/MODE Turn this signal OFF to specify mode 1 (Jog Operation Mode).
/JOGP
Turn this signal ON to jog forward at the jog speed registered in the jog speed table.
The motor is accelerated according to PnB29 (Acceleration Rate).
When this signal turns OFF, the motor is decelerated to a stop according to PnB2B
(Deceleration Rate).
/JOGN
Turn this signal ON to jog in reverse at the jog speed registered in the jog speed table.
The motor is accelerated according to PnB29 (Acceleration Rate).
When this signal turns OFF, the motor is decelerated to a stop according to PnB2B
(Deceleration Rate).
Output Signal Description
/BUSY
The /BUSY signal is ON while jog operation is being performed by turning ON the /JOGP
or
/JOGN signal.
It turns OFF when the Servomotor stops because the /JOGP or /JOGN signal was
turned OFF.
 Loading...
Loading...






