8.8 Manual Tuning
8.8.2 Feedforward
8-41
8.8.2
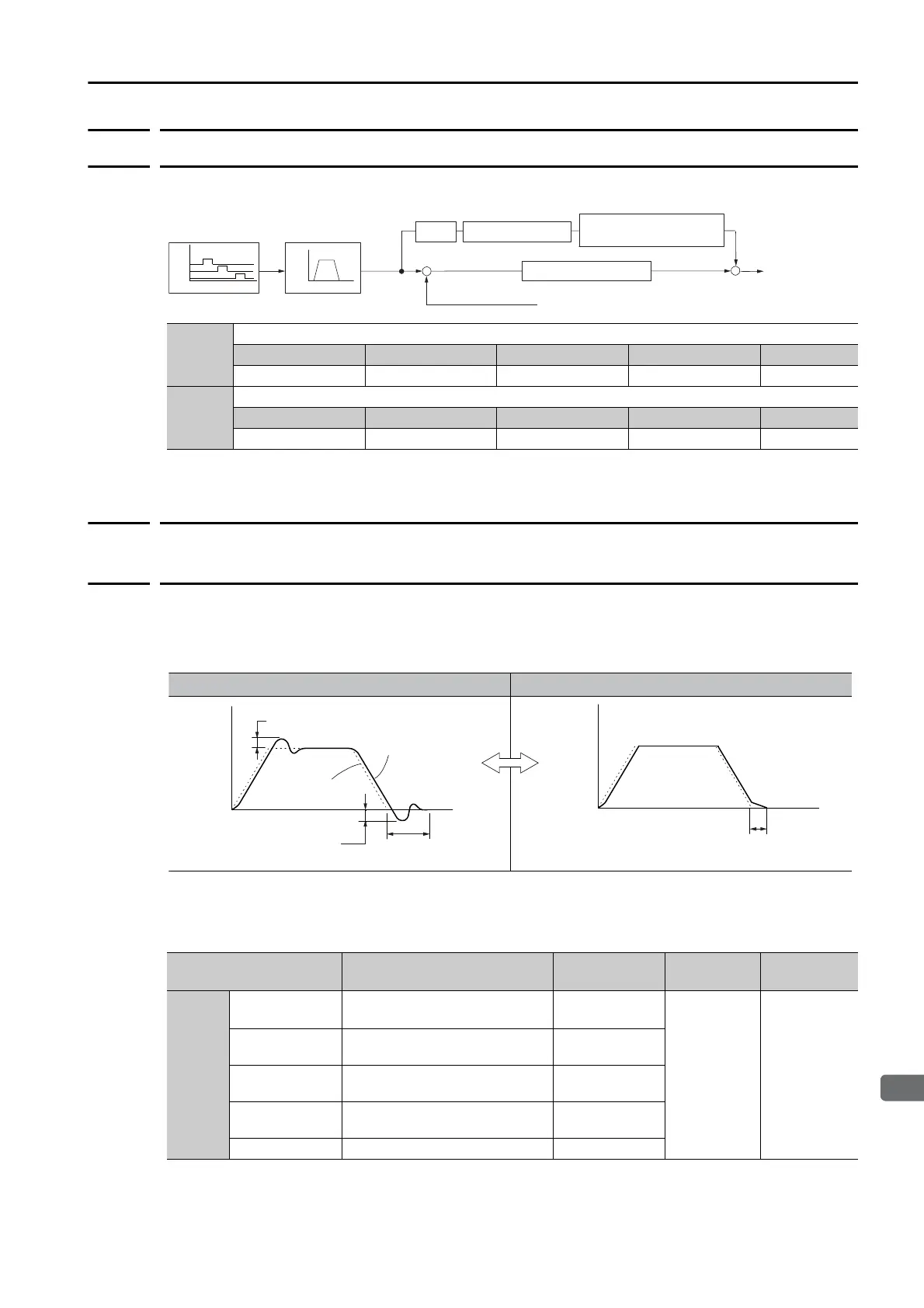
Feedforward
The feedforward function applies feedforward compensation to shorten the positioning time.
Note: If you set the feedforward value too high, the machine may vibrate. As a guideline, use a setting of 80% or
less.
8.8.3
Mode Switching (Changing between Proportional and PI
Control)
You can use mode switching to automatically change between proportional control and PI con-
trol.
Overshooting caused by acceleration and deceleration can be suppressed and the settling time
can be reduced by setting the switching condition and switching levels.
Related Parameters
Select the switching condition for mode switching with Pn10B = n.X.
Pn109
Feedforward
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 100 1% 0 Immediately Tuning
Pn10A
Feedforward Filter Time Constant
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 6,400 0.01 ms 0 Immediately Tuning
Feedback pulses
+
+
+
-
Position loop gain (Kp)
Pn109
Pn10A
Differential
Feedforward
Feedforward Filter
Time Constant
Speed
Speed pattern
Time
Movement
reference
Program table
Input
Signals
Time
Input pattern
Input
Parameter Mode Switching Selection
Parameter That
Sets the Level
When
Enabled
Classification
Pn10B
n.0
[default setting]
Use the internal torque refer-
ence as the condition.
Pn10C
Immediately Setup
n.1
Use the speed reference as the
condition.
Pn10D
n.
2
Use the acceleration reference
as the condition.
Pn10E
n.
3
Use the position deviation as
the condition.
Pn10F
n.
4 Do not use mode switching. -
Without Mode Switching With Mode Switching
Motor
speed
Overshooting
Actual Servomotor
operation
Reference
Time
Settling time
Overshooting
Motor
speed
Settling time
Time
 Loading...
Loading...






