5 Applied Instructions and Basic Usage
Data reception registers in the DVP-10PM series motion controller (message
with which the VFD-B series AC motor drive responds):
Register Data Description
D1070 low 01 H Address
D1071 low 03 H Function
D1072 low 04 H Quantity of Data (count by the byte)
D1073 low 17 H
D1074 low 70 H
Contents of the address 2102 H
D1075 low 00 H
D1076 low 00 H
Contents of the address 2103 H
D1077 low FE H CRC CHK Low
D1078 low 5C H CRC CHK High
Example 3
If a communication timeout occurs, the data received is incorrect, or the values
of parameters of the instruction MODRD are incorrect when a DVP-20PM
series motion controller is connected to a VFD-B series AC motor drive (ASCII
mode: M1143=OFF), the sending of data will be retried.
When X0 is ON, the DVP-20PM series motion controller used reads the data in
the data address H2100 in the VFD-B series AC motor drive whose device
address is 01, and store the data in D1070~D1085 in the form of ASCII
characters. The DVP-10PM series motion controller will automatically convert
the ASCII characters in D1070~D1085 into values, and store the values in
D1050~D1055.
If a communication timeout occurs, M1129 will be ON. If M1129 is ON, M1122
will be set to ON.
If the data received is incorrect, M1140 will be ON. If M1140 is ON, M1122 will
be set to ON.
If the values of parameters of the instruction MODWR is incorrect, M1141 will
be ON. If M1141 is ON, M1122 will be set to ON.
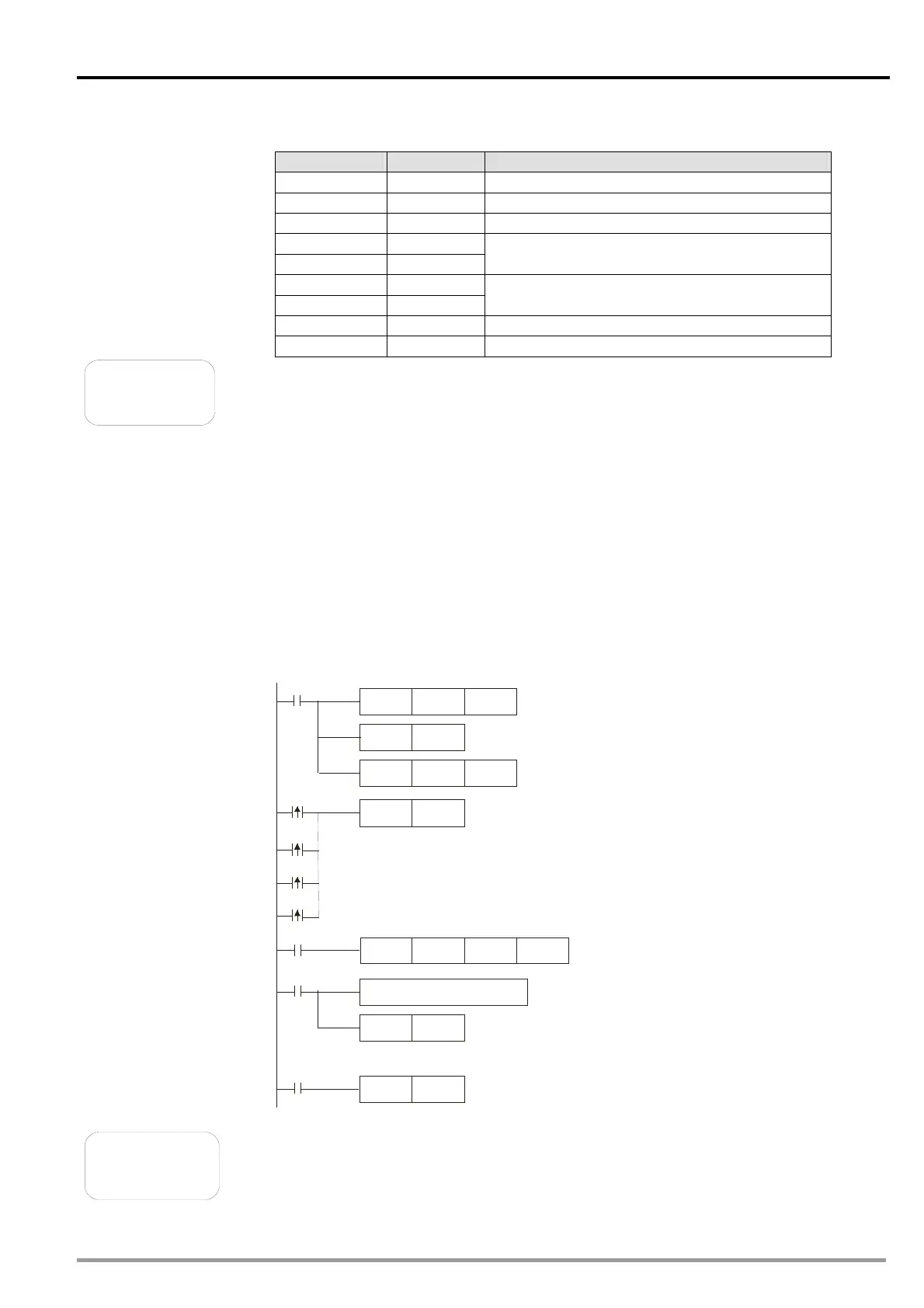
Processing the data received
Communication protocol: 9600,8,E,1
The communication protocol set is retained.
M1127 is reset.
Request for sending data
Communication command:
Device address: 01
Data address: H2101
Data length: 6 words
The reception
of data is complete.
M1002
MOV H87
D1120
SET M1120
MOV
K100 D1129
RST
M1127
M1127
SET
M1122
X0
M1129
M1140
M1141
When a communication timeout occurs, the sending of data is retried.
When the data received is incorrect, the sending of data is retried.
When the values of parameters of MODRD are incorrect, the sending of data is retried.
RST
M1129
MODRD
K1 H2100
K 6
X0
M1129
Communication timeout: 100 ms
The data received is stored in D1070~D1085 in the form
of ASCII characters. The DVP-10PM series motion controller
automatically convert the ASCII characters into values, and
stored the values in D1050~D1055.
M1129 is reset.
Additional
remark
LDP/ANDP/ORP and LDF/ANDF/ORF can not precede the instruction MODRD
(function code: H03), otherwise the data stored in data reception registers will
be incorrect.
The instruction can be used several times in a program, but one instruction is
executed at a time.
DVP-20PM Application Manual
5-89

 Loading...
Loading...








