11 CANopen Communication Card
CR#n60: Servo drive control
[Description]
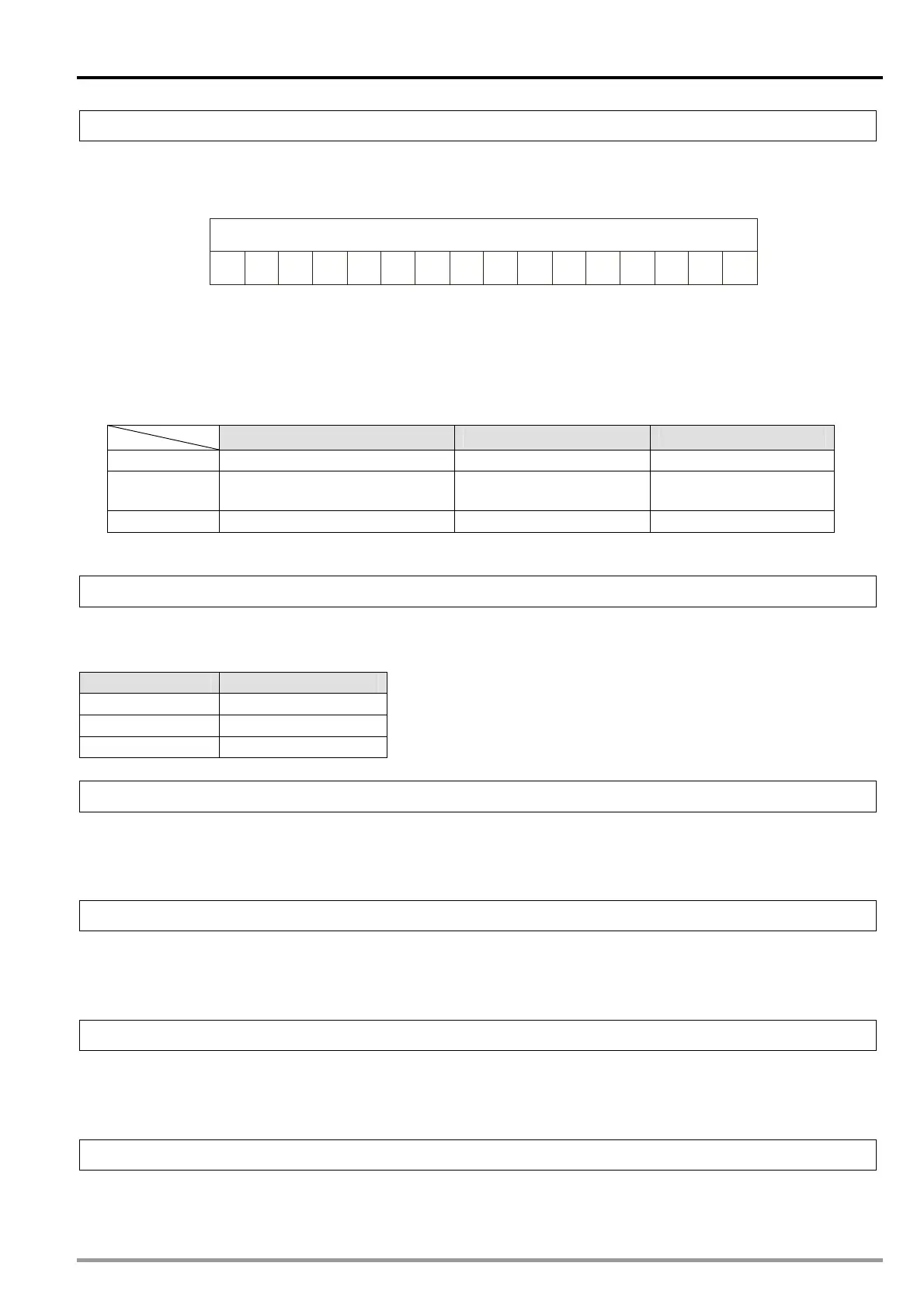
The control register is used to send a control command to an ASDA-A2 series servo drive. Please refer
to the table below for more information.
X
XX
EO
0123456789101
1
1
141
OMOMOM
FR
X
XX
X
XXXX
Control word
Bit
EO: The servo drive is enabled. The servo drive will be ON if the bit is 1.
FR: The error occurs in the servo is cleared. The servo drive will clear the error which appears if the
bit is 1.
OM: It is used to control the function of motion modes. Please refer to the table below for more
information.
Profile position mode Homing mode Interpolation mode
OM [4] Setting a new target position Enabling a homing mode X
OM [5]
A target position is allowed to
be changed during motion.
X X
OM [6] Absolute/Relative positioning X X
Note: “X” indicates “Reserved”.
CR#n61: Motion mode selection
[Description]
The control register is used to set the motion mode of a servo drive. Please refer to the table below for
more information.
Setting value Motion mode
0x01 Profile position mode
0x06 Homing mode
0x07 Interpolation mode
CR#n70~CR#n71: Target position of a profile position mode
[Description]
The control registers are used to set the target position of a profile position mode.
Data type: Double word
CR#n72~CR#n73: Target speed of a profile position mode
[Description]
The control registers are used to set the target speed of a profile position mode.
Data type: Double word
CR#n74~CR#n75: Acceleration time of a profile position mode
[Description]
The control registers are used to set the acceleration time of a profile position mode.
Data type: Double word
CR#n76~CR#n77: Deceleration time of a profile position mode
[Description]
The control registers are used to set the deceleration time of a profile position mode.
Data type: Double word
DVP-20PM Application Manual
11-13

 Loading...
Loading...








