P74x/EN FD/N
1, P742, P743
(FD) 9-
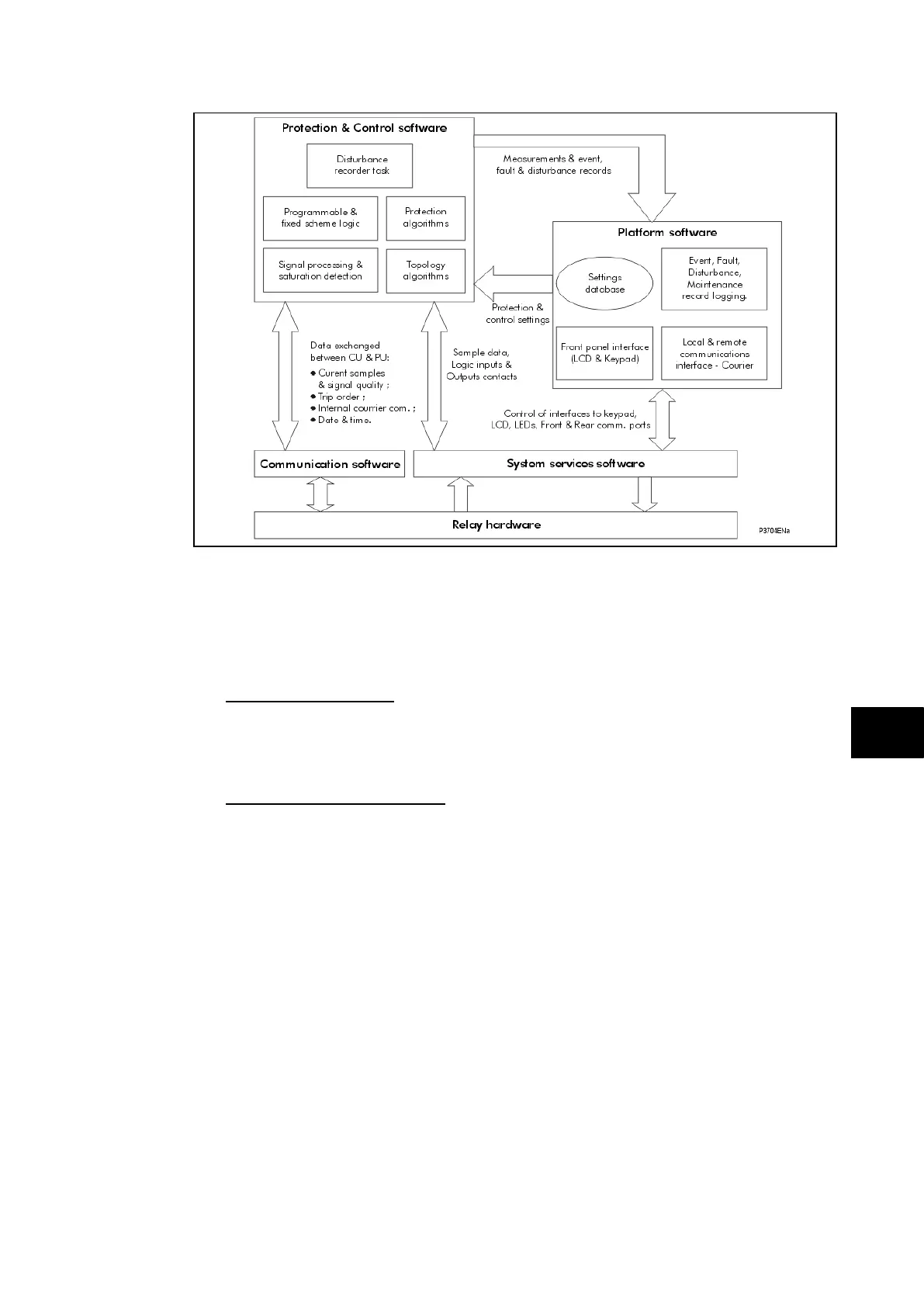
FIGURE 3: SOFTWARE OVERVIEW
1.2.1 Real-time operating system
As explain in the hardware overview, each relay contains one main board and one
coprocessor board. These two boards use two different operating system:
• For main board software: a real time operating system is used to provide a framework for
the different parts of the relay’s software to operate within. To this end the software is
split into tasks. The real-time operating system is responsible for scheduling the
processing of these tasks such that they are carried out in the time available and in the
desired order of priority.
• For coprocessor board software: a sequencer manages all the functions implemented on
the coprocessor board. Each function is executed at fixed frequency; consequently the
CPU load of the coprocessor is fixed and independent of the network’s frequency.
The real-time operating system is responsible for scheduling the processing of these tasks
such that they are carried out in the time available and in the desired order of priority. The
operating system is also responsible for the exchange of information between tasks, in the
form of messages.