4. Operation
4.2 Operation in Positioner Mode
4-44 ME0342-4B
[4] Pressing Operation
■ Sample use
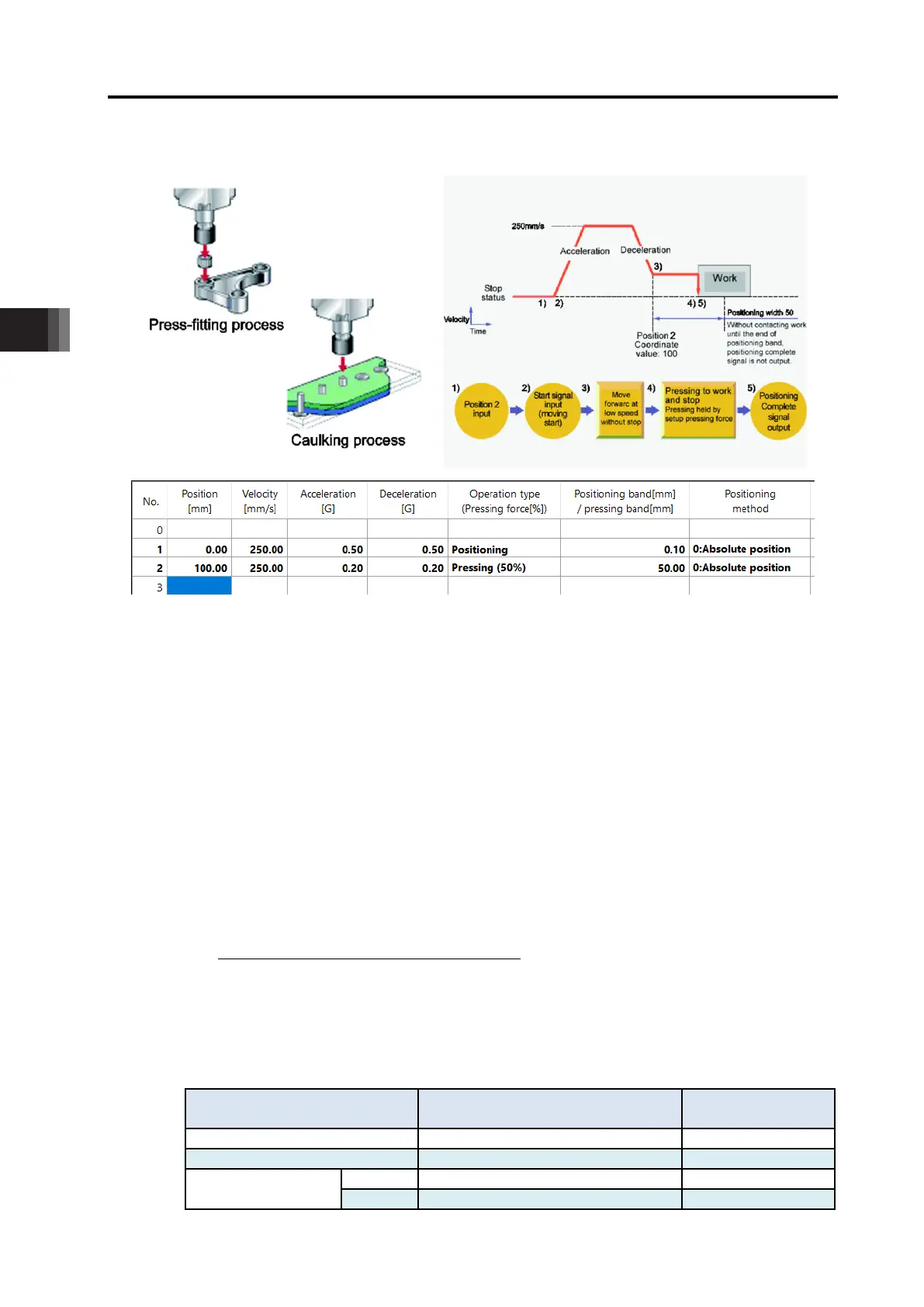
* Position No.2 sets pressing operation.
■ Control method
1) The method of controlling the pressing operation is the same as that described in [1]
Positioning except the setting of the position table. Any setting of “Pressing” in the position
table allows the pressing operation to be done. “Positioning width” is assumed as pressing
operation distance.
2) The actuator moves at the setting speed and rating torque to the position of the coordinate
set in “Position” in the similar way as normal positioning. Then the operation changes to
pressing. The moving distance in pressing is the value set in “Positioning width”. The
pressing is performed with the torque (current limit value) set in percent [%] in “Pressing” of
PIO patterns 0 to 3 being the upper limit.
The pressing force when using PCON-CBP/CGBP and the maximum current limit is set
should be the maximum pressing force [N] when force sensor is used. In this case, the value
for the target pressing force [N] setting should be figured out with the formula below.
Note 1 The maximum pressing force [N] when the force sensor is used and the maximum
pressing current limit [%] should differ depending on models. Shown in the table
below is the values for each model.
Actuator
(Pulse Pressing)
Max. Pressing Force [N]
when the force sensor is used
Max. Pressing
Current Limit [%]
RCP6-RRA7R-LCT
Max. Pressing Force [N]
when the force sensor is used
(Note 1)
Target Pressing Force [N]
Max. Pressing Current Limit [%]
(Note 1)

 Loading...
Loading...







