4. Operation
4.3 Pulse Train Control Mode
4-126 ME0342-4B
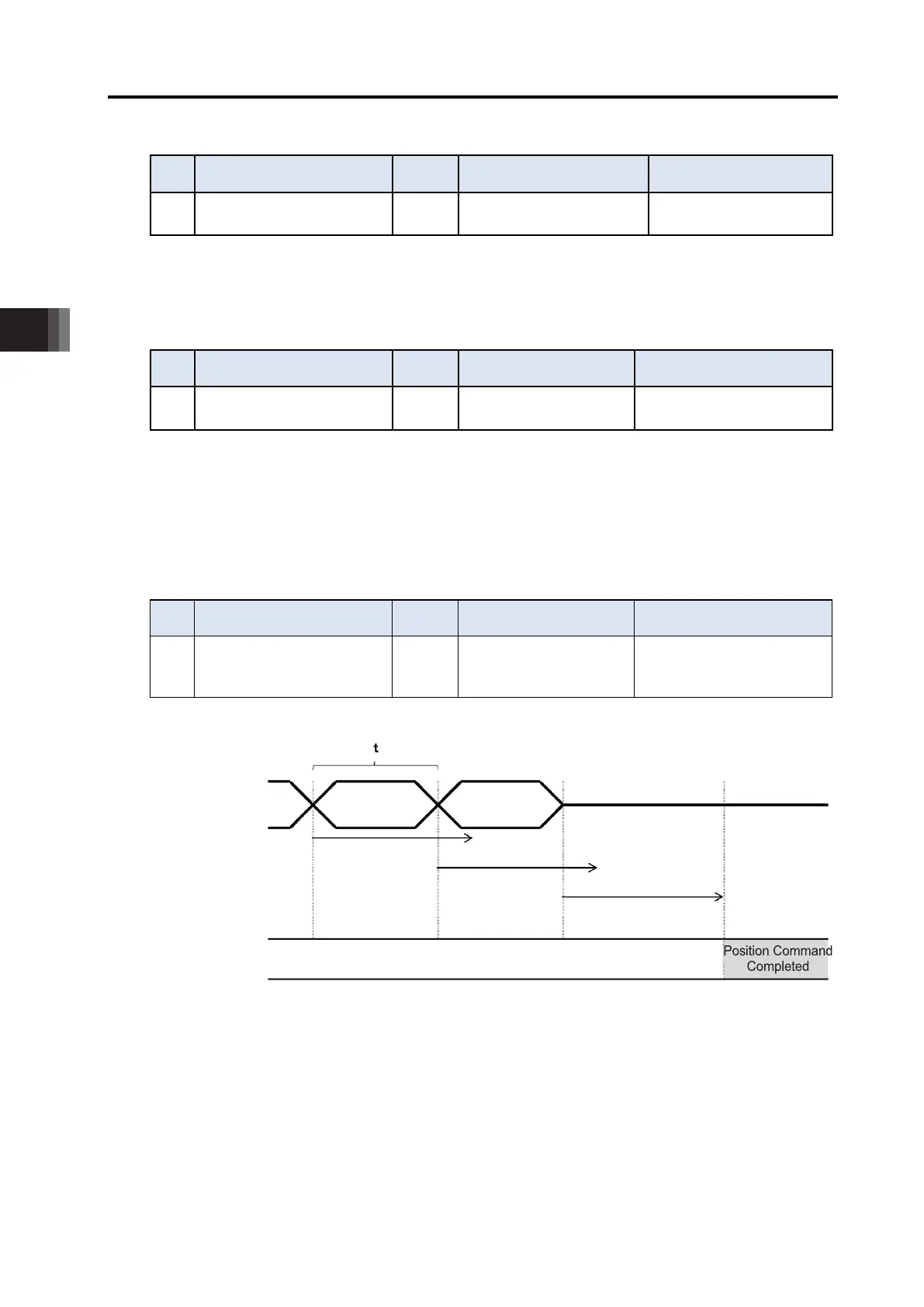
Setting T in
Parameter No. 187
Setting T in
Parameter No. 187
Setting T in
Parameter No. 187
Standby for Update of
Position Command
[7] Pulse Count Direction
No. Name Unit Input Range Default factory setting
62
Pulse count direction
−
0: Motor forward rotation
1: Motor reverse rotation
1
You can set the direction in which the motor turns according to command pulses.
[8] Select Enable/Disable Compulsory Stop Input
No. Name Unit Input Range Default factory setting
67
Select Enable/Disable
Compulsory Stop Input
− 0: Enable, 1: Disable 0
Compulsory stop of the actuator can be performed with PIO (CSTP Signal ON) from the host
system. In this parameter, a choice can be made from using (make activated) CSTP Signal
(Compulsory Stop Input Signal) and not using (make inactivated) the signal.
[9] Command Output Complete Judgment Time in Non-Positioner Mode
No. Name Unit Input Range Default factory setting
187
Judgment Time in Non-
ms 0 to 255 0
It should be set up when a low velocity operation
(Note 1)
is to be conducted in Pulse Train Control Mode.
The next position command waits for a period of time set in this parameter (T in figure above) after
input of a position command from the host controller (PLC). A judgment for the positioning complete
should be made and the complete signal (INP) should be output when there is no command issued
from the host controller for a period of Time T and the deviation is in the positioning band at the
same time.

 Loading...
Loading...






