6. Parameter
6.1 Parameter
6-19 ME0342-4B
[19] PIO Jog Velocity (Parameter No. 26)
No. Name Unit Input range
Default initial value setting
26 PIO Jog velocity
mm/s
(deg/s)
1 ~ Actuator
maximum speed
In accordance with actuator
It is the setting of the jog operation velocity with PIO Signal (jog input command) when PIO
Pattern = 1 (Teaching Mode) is selected.
Set an ideal value to suit the application.
[20] Movement command type (Parameter No.27)
No. Name Unit Input range
Default initial value setting
27 Movement command type -
0 : Level
1 : Edge
0
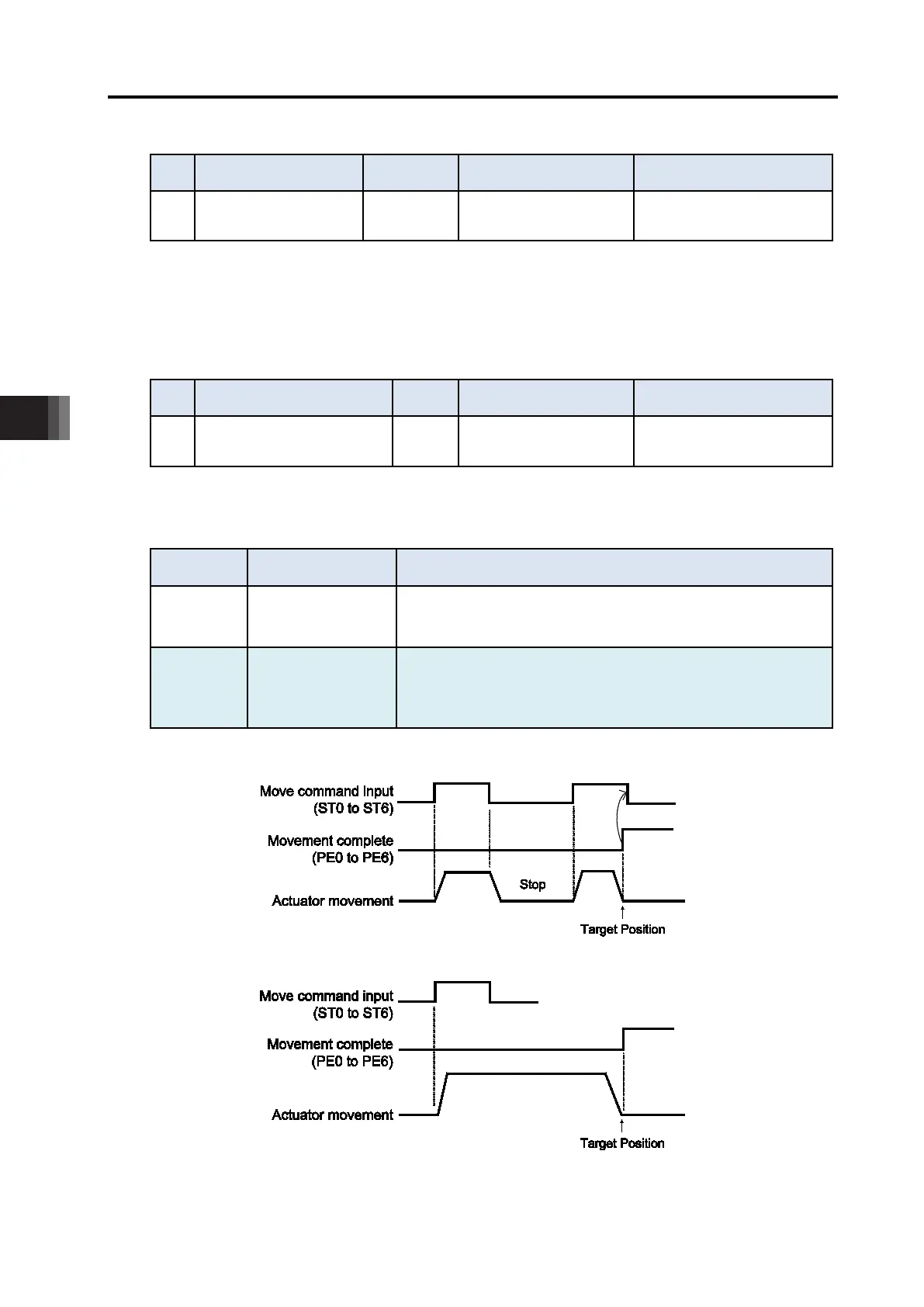
Set the input methods for the start signal (ST0 to ST6, or ST0 to ST2 if PIO Pattern = 5) when PIO
Pattern 4 = Solenoid Valve Mode 1 (7-point type), PIO Pattern 5 = Solenoid Valve Mode 2 (3-point
type) and PIO Pattern 7 = Force Sensor Used Pressing Mode 2 (Electromagnetic Valve Mode)
Set Value Input methods Description
0 Level
The actuator starts moving when the input signal turns ON.
When the signal turns OFF during movement, the actuator will
decelerate to a stop and complete its operation.
1 Edge
The actuator starts moving when the rising edge of the input
signal is detected. The actuator will not stop when the signal
turns OFF during the movement, until the target position is
[Level System]
[Edge System]

 Loading...
Loading...







