6. Parameter
6.1 Parameter
6-33
ME0342-4B
[51] Command pulse input mode (Parameter No.63) …Pulse train only
No. Name Unit Input range
Default initial value setting
63
Command pulse input mode
- 0 to 2 1
This parameter is exclusively used for the pulse-train control mode.
Refer to [4.3.4 Settings of Basic Parameters Required for Operation.]
[52] Command pulse input mode polarity (Parameter No.64) …Pulse train only
No. Name Unit Input range
Default initial value setting
64
Command pulse input mode
polarity
0: Positive Logic
1: Negative Logic
0
This parameter is exclusively used for the pulse-train control mode.
Refer to [4.3.4 Settings of Basic Parameters Required for Operation.]
[53] Electronic gear numerator (Parameter No.65) …Pulse train only
No. Name Unit Input range
Default initial value setting
65
Electronic gear numerator
- 1 to 4096 200
This parameter is exclusively used for the pulse-train control mode.
Refer to [4.3.4 Settings of Basic Parameters Required for Operation.]
[54] Electronic gear denominator (Parameter No.66) …Pulse train only
No. Name Unit Input range
Default initial value setting
66
Electronic gear denominator
- 1 to 4096 15
This parameter is exclusively used for the pulse-train control mode.
Refer to [4.3.4 Settings of Basic Parameters Required for Operation.]
[55] Select enable/disable compulsory stop input (Parameter No.67) …Pulse train only
No. Name Unit Input range
Default initial value setting
67
Select enable/disable
compulsory stop input
- 0 : Enabled 1 : Disabled 0
This parameter is exclusively used for the pulse-train control mode.
Refer to [4.3.5 Parameter Settings Required for Advanced Operations.]
6.1 Parameter
ME0342-4B 6-34
[56] Positional Feedforward Gain (Parameter No. 71)
No. Name Unit Input range
Default initial value setting
71
Positional feed forward gain
- 0 to 100 0
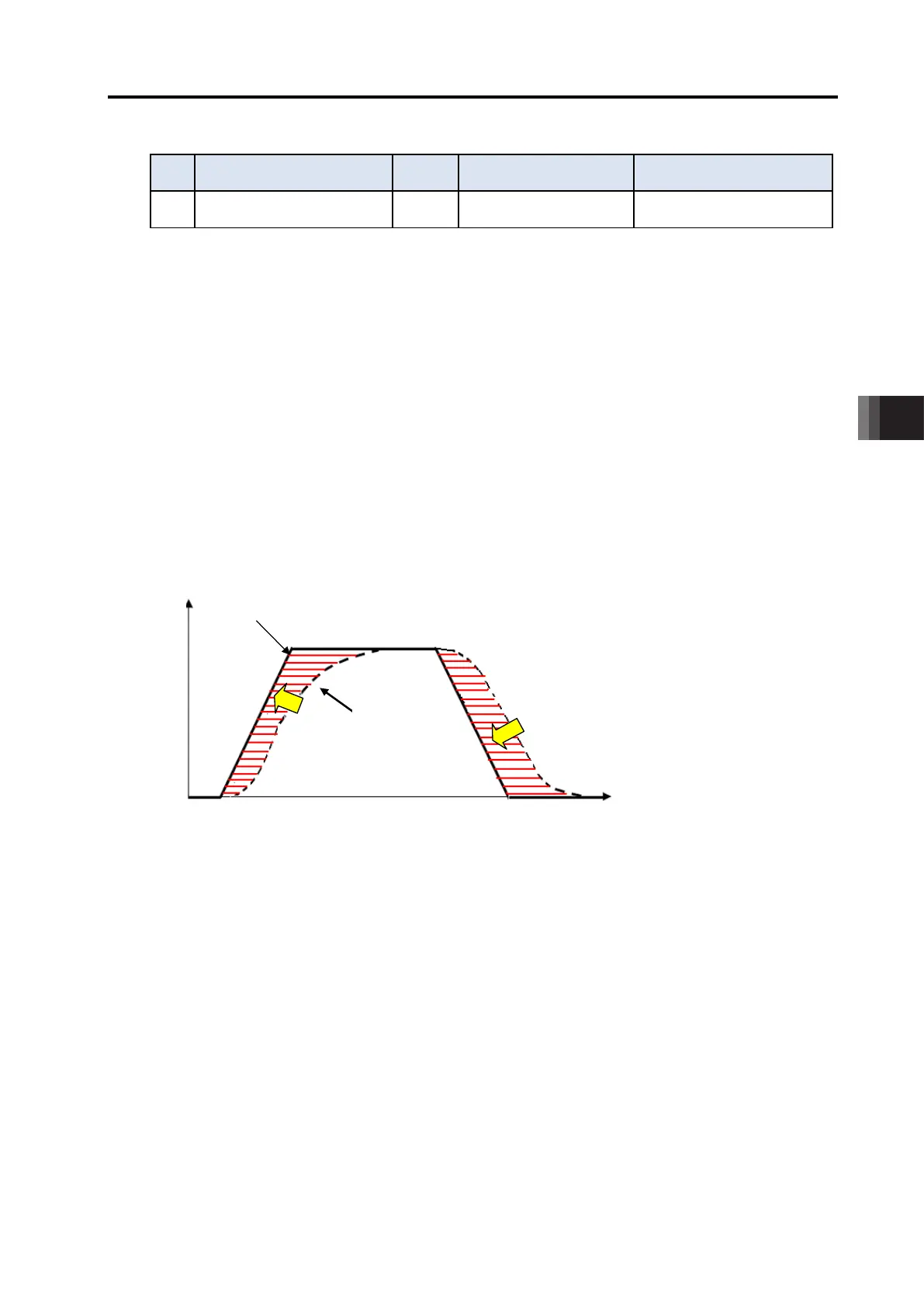
Sets the feed forward gain amount of the position control system.
For the trapezoidal operation pattern, the value obtained by multiplying the operation plan by “feed
forward gain” is added to the speed command so as to reduce the following delay of the speed
and the position deviation.
Performing this setting increases the servo gain and improves responsiveness of the position
control loop. Properly adjust Parameter No. 7 “Servo Gain Number” and Parameter No. 31
“Velocity Loop Proportional Gain”, etc., to further improve the tact time and following
performance. As a result, positioning time can be shortened.
Gain adjustment of position, speed, and current loop in the feedback control directly changes
the response of the servo control system, so affecting the stability of the control system due to
inappropriate setting may cause vibration and abnormal noise. However, this parameter only
changes the speed command value, so it is irrelevant to the servo loop, and it would not
generate persistent vibration and noise. However, if the setting is excessive, every time it
operates, vibration and noise may be generated until the machine follows the command value.
Speed
Speed command value (trapezoid pattern)
Actual speed
Time

 Loading...
Loading...







