8. Troubleshooting
8.3 About Alarms
8-17 ME0342-4B
Cause : The current position writing signal (PWRT) was input during a
jog operation when in PIO Pattern 1 Teaching Mode.
Countermeasure : Confirm the status of stop (the movement in
process signal MOVE is off) before inputting.
093 Homing incomplete status
PWRT signal detected
Cause : The current position writing signal (PWRT) was input while
the home-return operation was not completed when in PIO
Pattern 1 Teaching Mode.
Countermeasure : Input the home-return signal HOME first, confirm
the status of the home-return complete (HEND
Signal is on) before inputting.
with datum position
movement command
Cause : 1) Datum position movement command (RSTR) signal is
turned ON while Deviation Counter Clearing (DCLR) signal
is ON.
2) DCLR signal is ON while datum position movement.
Countermeasure : Turn on DCLR signal in appropriate timing.
Cause : 1) A movement command was attempted to an empty
position.
2) The value of the target value in the “Position” field
exceeded the Parameter No.3 and 4 “Soft limit set value”.
3) A target position was specified in the “Position” field by
relative coordinate in the solenoid valve mode 2 of PIO
pattern 5.
Countermeasure : 1) Set the position data.
2) Change the target position value to the one
within the soft limit set value.
3) The target position cannot be set by relative
coordinate (incremental feed).
Cause : The number for command is out of the range when command
was made with the direct numerical command.
Countermeasure : A code of a command that is out of the range
should be shown in the detail address. Input an
appropriate value by referring to these values.
Detailed Address
(Command Item Code)
Pressing Current Limit Value
Cause : The number of input command pulses exceeded the range of
-134217728 to +134217728 (H'F8000000 to H'07FFFFFF).
Countermeasure : Attempt to make the value of the electrical gear
ratio smaller (make the movement against the unit
8.3 About Alarms
ME0342-4B 8-18
Alarm Name Alarm Name
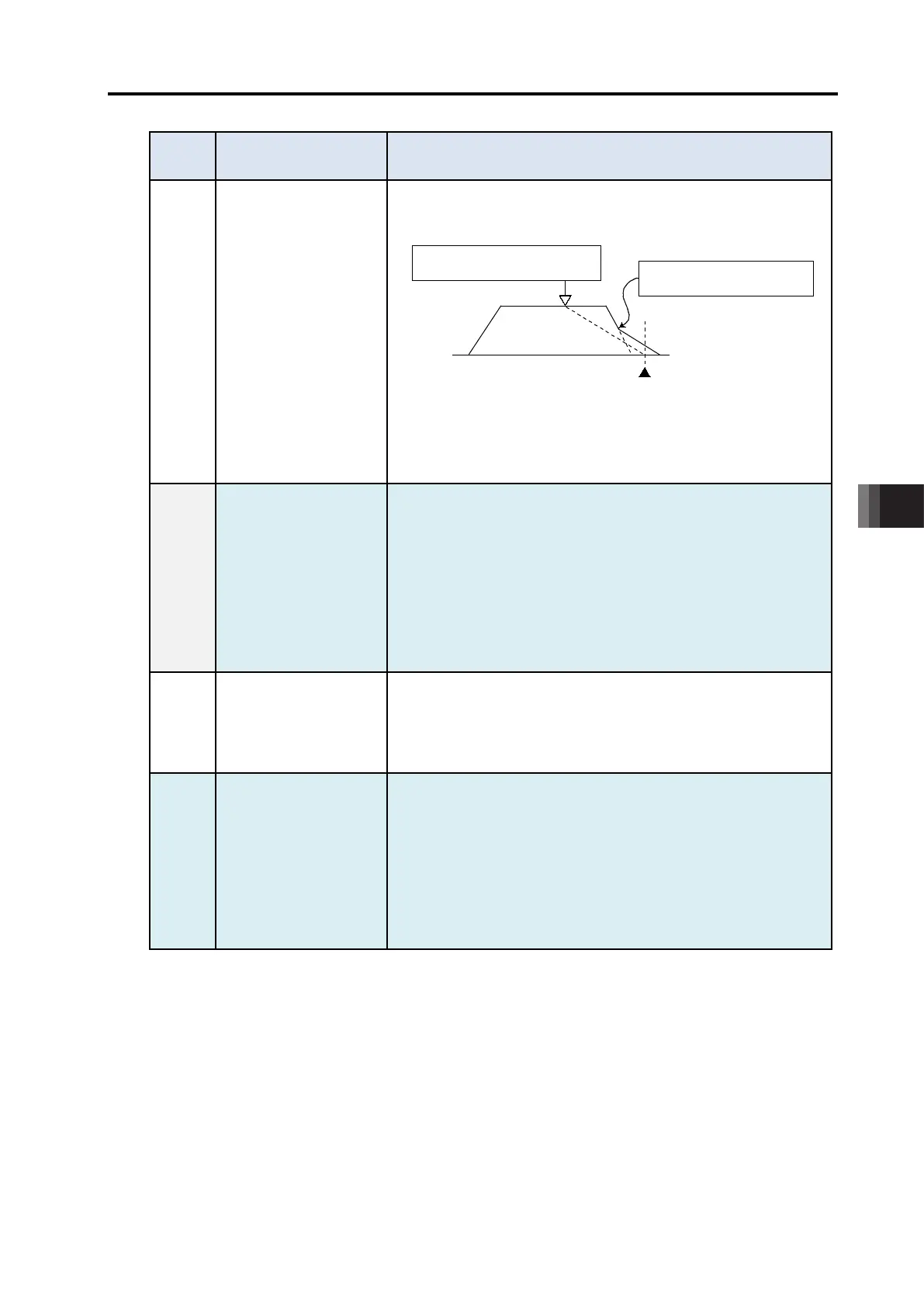
error
Cause : Insufficient deceleration distance when deceleration has been
reduced during travel. The software limit has been exceeded
when decelerating from the current position after the change.
Countermeasure : Because the timing of the next travel command
when changing the speed during travel is delayed,
it is necessary to set the travel command timing for
deceleration change faster.
0BA
CB
limited
Home sensor not
detected
Cause : Indicates that the home return motion of an actuator with
home sensor has not completed normally.
1) The workpiece interferes with the surroundings during
home return.
2) The sliding resistance of the actuator is excessive.
3) Poor mounting, malfunction, or disconnection of the home
sensor.
Countermeasure : If the workpiece does not interfere with the
surroundings, 2) and 3) should be considered.
Perform a maintenance or repair work.
Cause : Home return does not complete after elapse of a certain
period after the start of home return.
Countermeasure : This error does not occur in normal operation. The
combination of the controller and actuator may be
Cause : Motor rotation speed exceeded the allowable rotation speed.
1) The sliding resistance of the actuator is locally excessive.
2) There may be a concern of sudden speed rise before
detecting a servo error such as the external force is applied
momentarily.
Countermeasure : This does not occur in normal operation, so confirm
that there are no assembly errors. Also, confirm
whether external force is applied in the direction of
Deceleration start position when
software limit is not exceeded
Commands given at this position
will exceed the software limit

 Loading...
Loading...






