166
Appendix A—Description of parameters
VARIABLE SPEED DRIVE SERIES III LIT-12012999—June 2018 www.johnsoncontrols.com
Code Modbus ID Parameter Application RO/RW
P4.2.4 255 Stop DC-Brake Time 1,2,3 RW
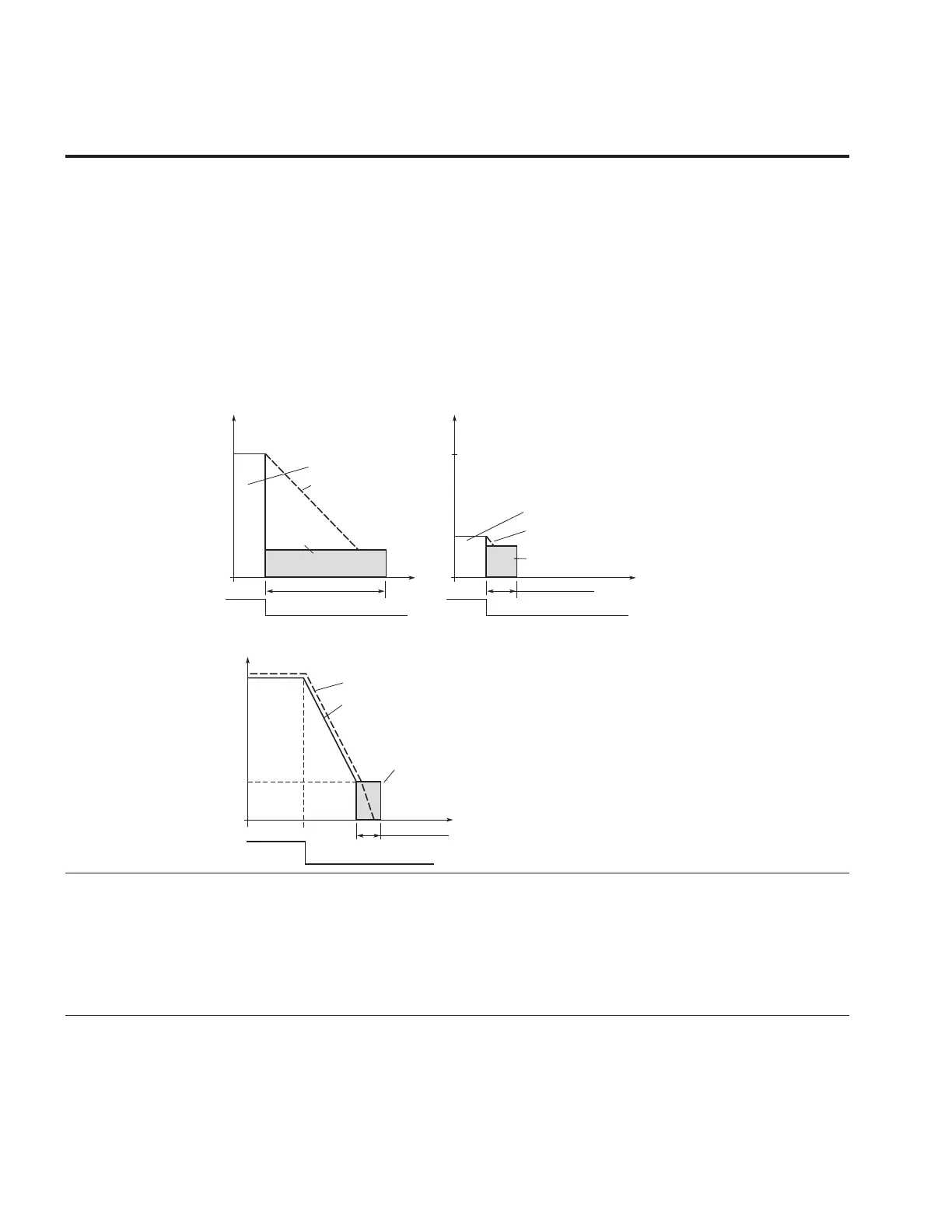
Use this parameter to set the length of DC braking at stop.
0.0 = DC-brake is not used
>0.0 = DC-brake is in use and its function depends on the Stop function. The DC-braking time is
determined with this parameter.
Para ID 253 = 1; Stop function = Ramp:
After the stop command, the motor coasts to a stop without control of the frequency converter.
With DC-injection, the motor can be electrically stopped in the shortest possible time, without using an
optional external braking resistor.
The braking time is scaled according to the frequency when the DC-braking starts. If the frequency is
≥ the nominal frequency of the motor, the set value of parameter ID 255 determines the braking time.
When the frequency is ≤10% of the nominal, the braking time is 10% of the set value of Para ID 255.
Para ID 253 = 1; Stop function = Ramp:
After the Stop command, the speed of the motor is reduced according to the set deceleration
parameters, as fast as possible, to the speed defined with Para ID 262, where the DC-braking starts.
The braking time is defined with Para ID 262. If high inertia exists, it is recommended to use an external
braking resistor for faster deceleration.
Figure 57. DC-Braking time when stop mode = coasting
t
f
out
Output Frequency
Motor Speed
DC-Braking ON
RUN
STOP
t = 1 x P14.4
t
f
out
f
n
f
n
Output Frequency
Motor Speed
DC-Braking ON
RUN
STOP
t = 0.1 x P14.4
0.1 x f
n
Figure 58. DC-Braking time when stop mode = ramp
t
Output Frequency
Motor Speed
DC-Braking
RUN
STOP
P14.3
t = P14.4
f
out
P4.2.5 251 Brake Chopper Define 1,2,3 RW
Use this parameter to enable/disable the internal brake chopper logic if a break chopper is installed.
When the frequency converter is decelerating the motor, the inertia of the motor and the load is fed into
an external brake resistor. This enables the frequency converter to decelerate the load with a torque
equal to that of acceleration (provided that the correct brake resistor has been selected).
0 = No brake chopper used
1 = Brake chopper in use and tested when running. Can be tested also in READY state.
2 = External brake chopper (no testing)
3 = Used and tested in READY state and when running
4 = Used when running (no testing)