168
Appendix A—Description of parameters
VARIABLE SPEED DRIVE SERIES III LIT-12012999—June 2018 www.johnsoncontrols.com
Code Modbus ID Parameter Application RO/RW
P4.3.7 261 Skip F3 High Limit 1,2,3 RW
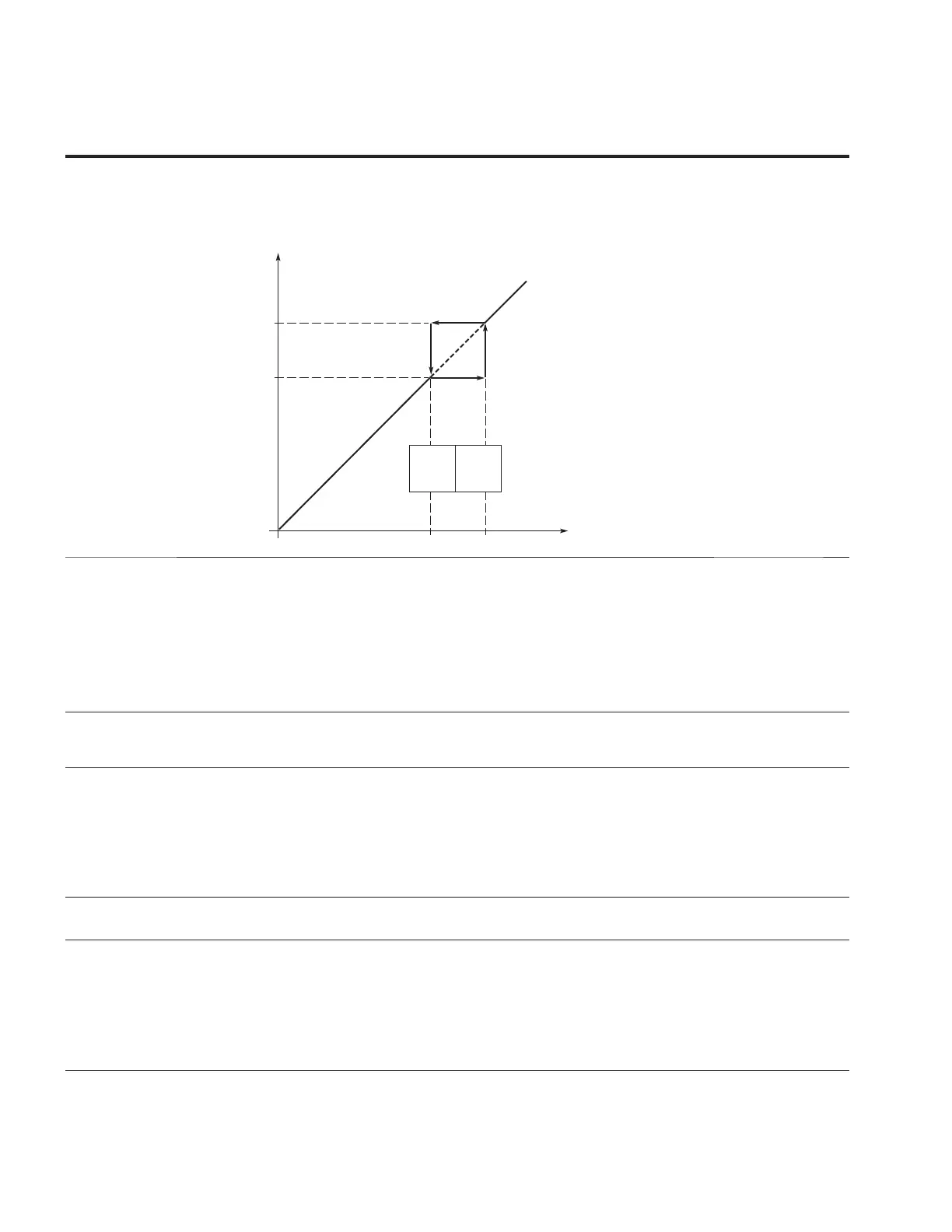
Use this parameter to set frequency limits to prevent the drive from operating in, the frequency
converter will skip the set frequencies, ramp time will be the same. In some systems it may be
necessary to avoid certain frequencies because of mechanical resonance problems.
Figure 59. Example of skip frequency area setting
Output
Frequency
(Hz)
P7.15
P7.17
P7.19
P7.16
P7.18
P7.20
Reference (Hz)
P4.4.1 2122 Currency 1,2,3 RW
Use this parameter to set the local currency value for where the drive is located so it can perform the
Energy Savings estimation in terms of currency saved.
0 = $
1 = GBP
2 = Eur
3 = JPY
4 = Rs
5 = R$
6 = Fr
7 = Kr
P4.4.2 2123 Energy Cost 1,2,3 RW
Use this parameter to set the local energy cost per kW, with this value the drive will use it in the energy
savings calculation.
P4.4.3 2124 Data Type 1,2,3 RW
Use this parameter to select the format to view Energy Savings in. The drive takes four recordings in an
hour and then calculates the average based off this setting. The savings is compared to what it would
cost to run a across the line starter in the same load.
0 = Cumulative
1 = Daily Avg
2 = Weekly Avg
3 = Monthly Avg
4 = Yearly Avg
P4.4.4 2125 Energy Savings Reset 1,2,3 RW
Use this parameter to reset the Energy Savings calculation value.
P5.1.1 287 Motor Control Mode 1,2,3 RW
Use this parameter to set the drive control mode.
0 = Frequency control: Motor is controlled by giving a frequency reference to it. Voltage reference is
calculated from scalar U/f ratio according to preprogrammed curve. (Output frequency resolution = 0.01
Hz). The frequency reference can be from I/O terminal, keypad or communication bus.
1 = Speed control: Motor is controlled by giving a frequency reference to it with slip compensation.
Voltage reference is calculated from scalar U/f ratio according to preprogrammed curve. (Output
frequency resolution = 0.01 Hz). The speed reference can be from I/O terminal, keypad or communication
bus (accuracy ±0.5%).