179
Appendix A—Description of parameters
VARIABLE SPEED DRIVE SERIES III LIT-12012999—June 2018 www.johnsoncontrols.com
Code Modbus ID Parameter Application RO/RW
P6.3.2 335 OPTCard Fault Response 1,2,3 RW
This parameter used to set the reaction after a “Link to Option Card” condition occures. This failure
could be device dependent.
0 = No response
1 = Warning
2 = Fault, stop mode after fault according to standard stop mode.
3 = Fault, stop mode after fault always by coasting
P6.3.3 1678 IP Address Confliction Resp 1,2,3 RW
This parameter sets the device reaction after a “IP Conflict” condition has occurred, when the ip address
is duplicated on the network. This condition could be possible device dependent.
0 = No response
1 = Warning
2 = Fault, stop mode after fault according to standard stop mode
3 = Fault, stop mode after fault always by coasting
P6.3.4 2157 Keypad Comm Fault Response 1,2,3 RW
This parameter determines the device reaction after a “Keypad Fualt” condition. This condition could be
possible device dependent.
0 = No Action
1 = Warning
2 = Fault, stop mode after fault according to standard stop mode
3 = Fault, stop mode after fault always by coasting
P6.4.1 321 AR Wait Time 1,2,3 RW
This parameter defines the time before the frequency converter tries to automatically restart the motor
after a specific fault condition has been received. Auto Restart faults listed Para ID324 to Para ID336.
P6.4.2 322 AR Trail Time 1,2,3 RW
This parameter sets the amount of time after the Wait time that the drive uses the restart tries to
attempt to restart the fault, after this time has run out without resetting the alarm drive will fault.
Para ID324 to Para ID336 determine the maximum number of automatic restarts during the trial time set
by Para ID322. The time count starts from the first auto restart. If the number of faults occurring during
the trial time exceeds the values of Para ID324 to Para ID336 the fault state becomes active. Otherwise
the fault is cleared after the trial time has elapsed and the next fault starts the trial time count again.
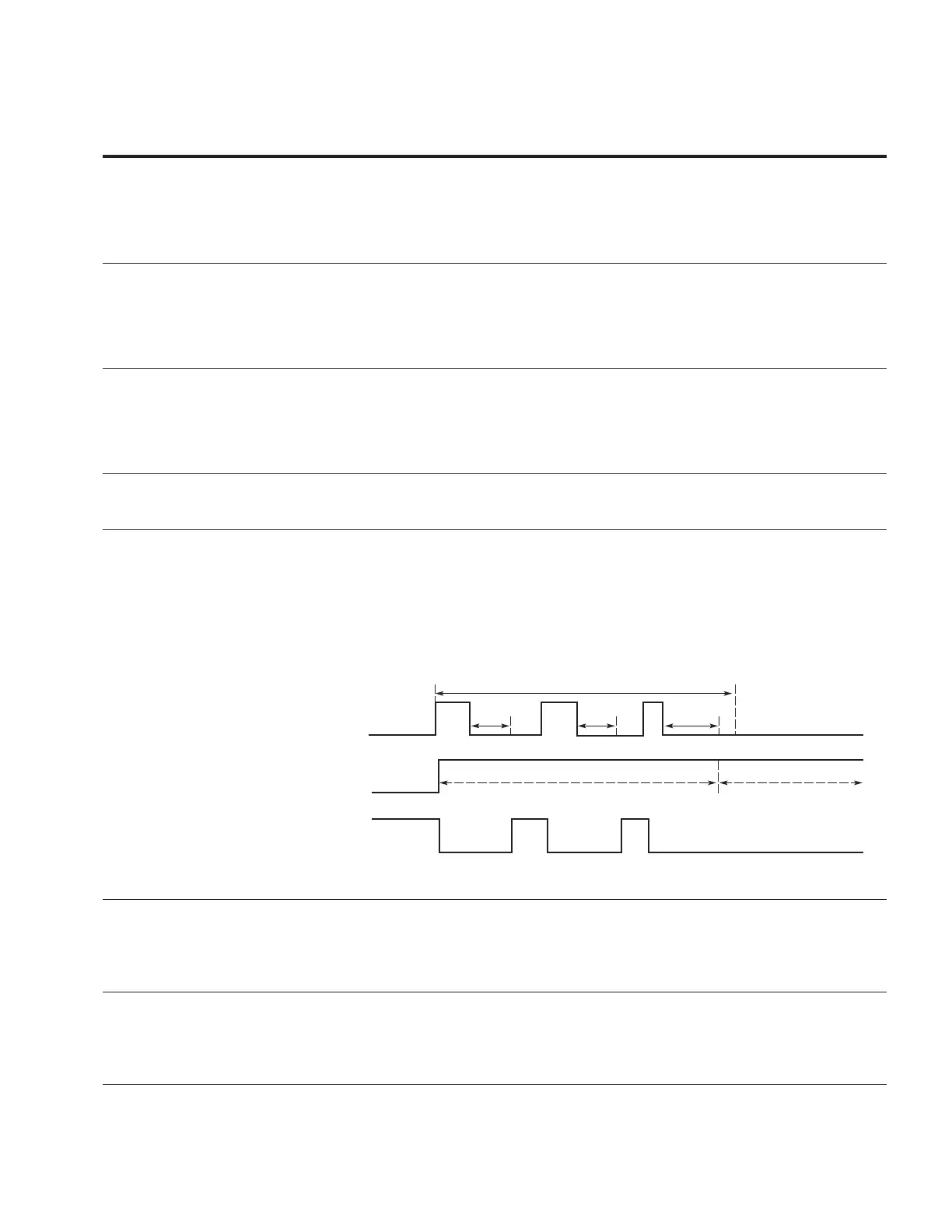
If a single fault remains during the trial time, a fault state is true.
Figure 68. Auto restart fail (try number >2.)
Fault condition
Fig5. Auto restart fail (try number >2.)
Trial time
Wait time Wait time Wait time
Fault display
Run command
Ar fault Trip fault
P6.4.3 323 AR Start Function 1,2,3 RW
This parameter defines the way the device handles the start operation after a fault occurs. The
parameter defines the start mode upon a auto restart condition:
0 = Start with ramp
1 = Flying start
2 = Start according to the standard start mode
P6.4.4 324 Undervoltage Attempts 1,2,3 RW
This parameter determines the number of allowed restart-attempts after “DC-Undervotlag” condition
has occured.
0 = No automatic restart
>0 = Number of automatic restarts after under voltage fault. The fault is reset and the drive is started
automatically after the DC-link voltage has returned to the normal level.