188
Appendix A—Description of parameters
VARIABLE SPEED DRIVE SERIES III LIT-12012999—June 2018 www.johnsoncontrols.com
Code Modbus ID Parameter Application RO/RW
P8.3.3.11 1417 PID2 Set Point 2 Comp Max 2,3 RW
Use this parameter to set the maximum compensation for the PID setpoint value that is applied to
the output frequency of the drive is at its maximum frequency level. This value is added to the actual
setpoint value as a function of the output frequency.
Set Point Compensation = comp max * (output freq–min freq)/(max freq–min freq).
Procedure for setting up PID Application:
Initially set PID Gain(Para ID1356) to 0.0% and set the PID I Time (Para ID1357) to 20 sec. Start the
frequency converter and verify if the set point is reached quickly while maintaining stable operation of
the system. If not increase the PID Gain (Para ID1356) until the drive speed oscillates constantly. After
this occurs reduce the PID Gain (Para ID1356) slightly to reduce the oscillation. From here take the value
found for PID Gain (Para ID1356) to 0.5 times that value and reduce the PID I time (Para ID1357) until the
feedback signal oscillates again. Increase the PID I time (Para ID1357) until the oscillation stops, with
that value take it times 1.2 and use that value for the PID I time (Para ID1357). If signal noise is seen at
high frequency increase the filter time value to filter the signal. If further tuning is required refer to the
table showing what is effected.
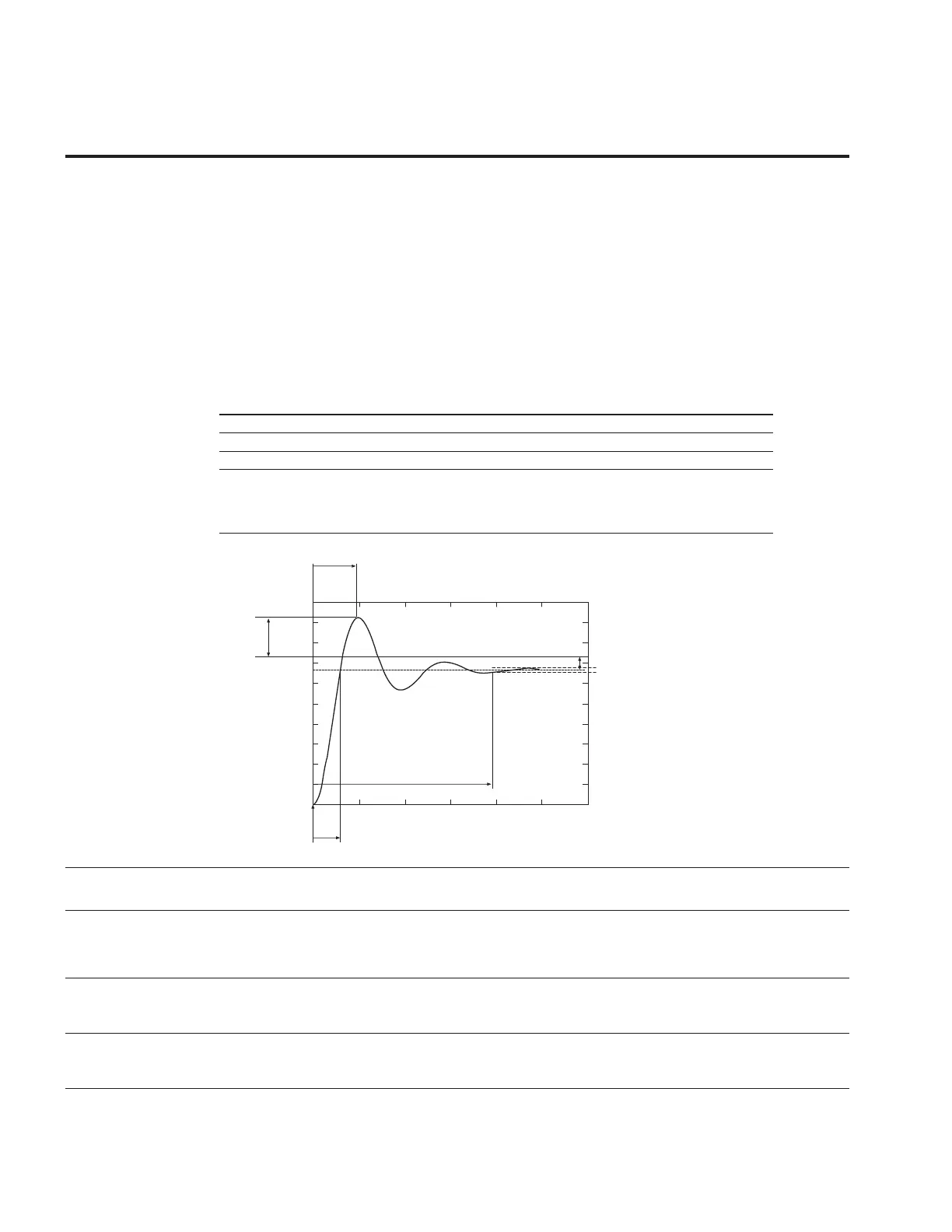
Figure 70. Setting up PID application
Response Rise time Overshoot Settling time Steady state error
Increase PID Gain Decrease Rise Increases Overshoot Not Affected Decreases Error
Increase PID1 Time Decrease Rise Increases Overshoot Increases Setting Eliminates Error
Increase PID0 Time Not Affected Decreases Overshoot Decreases Setting Not Affected
Rise Time—the time required for the output to rise 90% of the desired level for the first time.
Overshoot—the difference between the peak level and the steady state level. Setting Time—time required for the
system to converge to its steady state.
Steady State Error—the difference between the steady state level and the desired output level.
Peak
Time
Desired
Amplitude
Overshoot
Steady State
Error
Settling Time
Rise Time
12108642
0.05
0
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
P8.2.3 2548 FB PID2 Set Point 2 2,3 RW
PID Set point value from Network. Can be assigned to PID Set Point Source
P8.4.1.1 1392 PID2 Feedback Func 2,3 RW
Use this paramter to select if the feedback value is taken form a single signal or a combination of
two signals. The mathematical functions can be selected that is used when two feedback signals
are combined.
P8.4.1.2 1393 PID2 Feedback Gain 2,3 RW
Use this parameter to set the gain associated with feedback signal from the measuring signals defined
in the feedback function.
P8.4.2.1 1394 PID2 Feedback 1 Source 2,3 RW
Use this parameter is used to select where feedback signal is being fed into the drive. This signal could
be defined as analog inputs or fieldbus data value.