4. Parameters
4-53
4.4 Parameter Setting
4.4.1 System Parameter Setting
1. Motor ID setting [P0-00]
Refer to motor ID: xxx on the label.
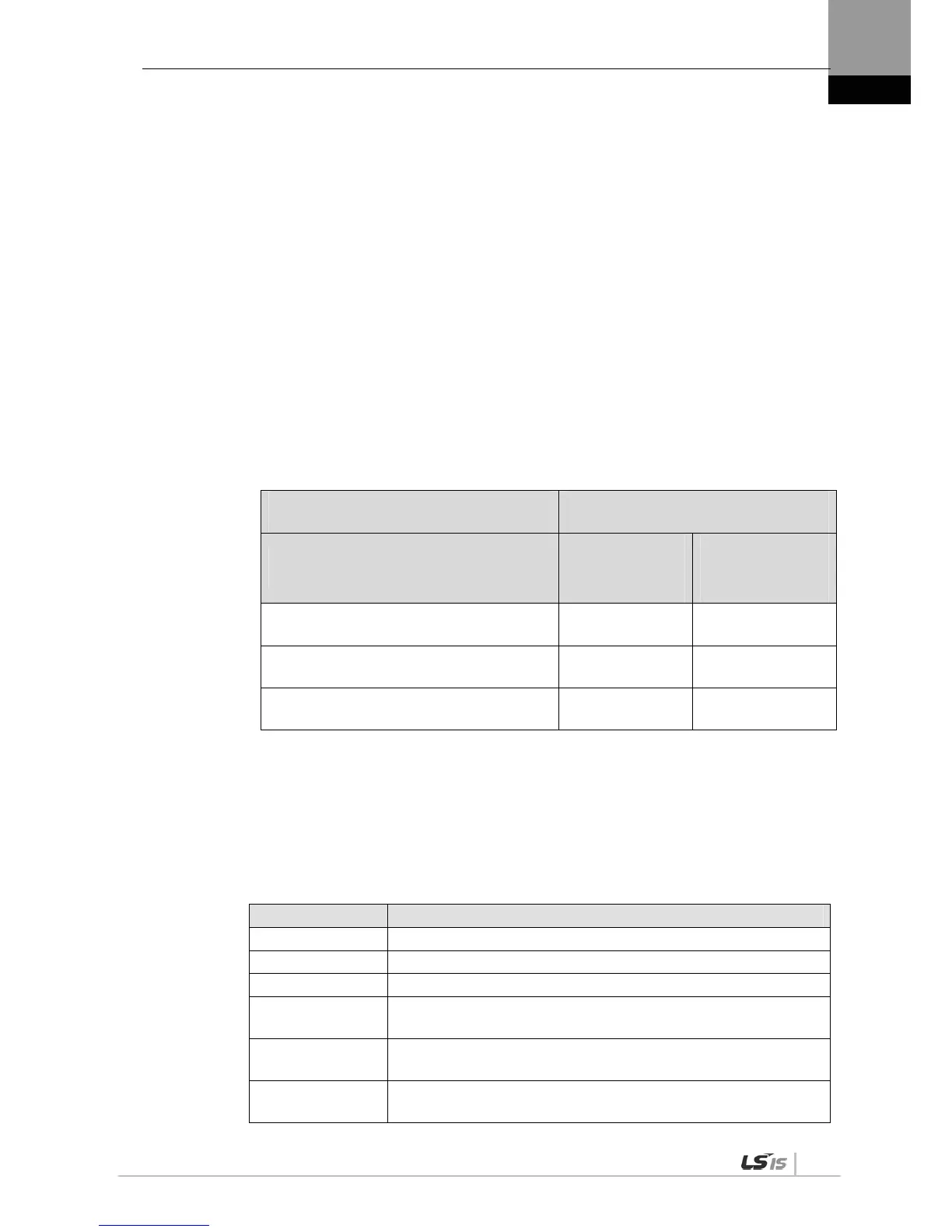
2. Encoder setting
Encoder type [P0-01]
Refer to encoder content
of the label attached to the motor and the table below.
Encoder pulse [P0-02]
Refer to encoder content
of the label attached to the motor and the table below.
Please caution encoder type is different depending on part in XML-SB04AK1G103 from motor’s
name.
The label attached to the motor System parameter setting
XML-SB04A□K1G103
Encoder Type
[P0-01]
Enc Resolution
[P0-02]
A~G (Incremental parallel Type) 0 1024~6000p/r
N (Single turn Serial Type) 1 19 [bits]
M (Multi turn Serial Type) 3 19 [bits]
Note 1) When Single turn Serial Type is connected, it sets the value of P0-00, P0-01, P0-02
automatically.
Note 2) Incremental parallel Type is p/r input, Single turn Serial and Multi turn Serial Type is Bit
input.
3. Operation mode setting [P0-03]: Sets operation mode of the servo.
Operation Mode Operation Method
0 Torque control operation
1 Speed control operation
2 Position control operation
3
Mode contact ON: Position control operation
Mode contact OFF: Speed control operation
4
Mode contact ON: Speed control operation
Mode contact OFF: Torque control operation
5
Mode contact ON: Position control operation
Mode contact OFF: Torque control operation

 Loading...
Loading...
