4. Parameters
4-30
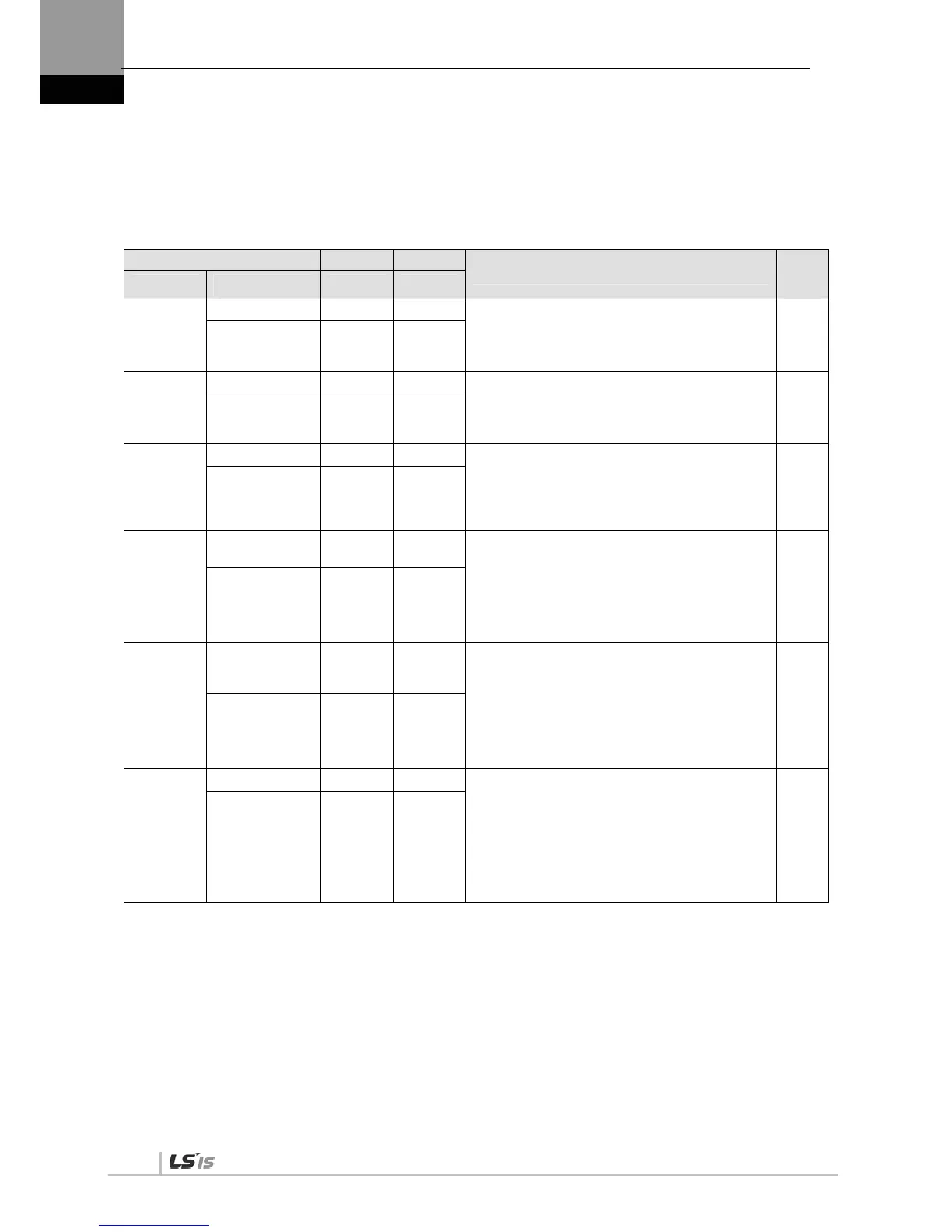
4.2.3 System Setting Parameter
For detailed information, refer to "4.4.1 System Parameter Setting."
“**” Modification is not possible with the servo on & Power reset parameter.
“*” Parameter that cannot be modified with the servo on
Parameter Unit Initial
Details
Appli
cation
mode
**P0-00
Motor ID - 999 Set Motor ID.
If the attempt to read motor data fails, the initial
value is set to 999.
(Details: Refer to “4.4.1 System Parameter Setting.")
PST
Motor ID 0 999
**P0-01
Encoder type - 0
0: Quadrature Type encoder.
1: Single turn Serial encoder.
3: Multi turn Serial encoder
(Details: Refer to “4.4.1 System Parameter Setting.")
PST
Encoder type 0 5
**P0-02
Encoder pulse [ppr] 3000 Serial Type encoder: Set the number of bits per
turn from the encoder.
Quadrature Type encoder: Sets the number of
encoder pulses.
(Details: Refer to “4.4.1 System Parameter Setting.")
PST
Enc resolution 1 30000
*P0-03
Select operation
mode
- 1
Sets operation mode.
(0: Torque operation. 1: Speed operation. 2: Position
operation. 3: Speed/position operation. 4:
Torque/speed operation. 5: Torque/position
operation.)
(Details: Refer to “4.4.1 Speed Operation Parameter
Setting.")
PST
Operation mode 0 5
**P0-04
RS422
communication
speed
[bps] 0
Sets communication speed for RS-422
communication.
0 : 9600 [bps]
1 : 19200 [bps]
2 : 38400 [bps]
3 : 57600 [bps]
(Details: Refer to “4.4.1 System Parameter Setting.")
PST
RS422 baud rate 0 3
**P0-05
System ID - 0 Sets drive ID for communication.
An ID can be given to the servo if USB
communication, RS422 communication and BUS
communication are used for communication with
the servo.
A unique ID can be given to the servo and used
for individual communication with it.
(Details: Refer to “4.4.1 System Parameter Setting.")
PST
System ID 0 99

 Loading...
Loading...
