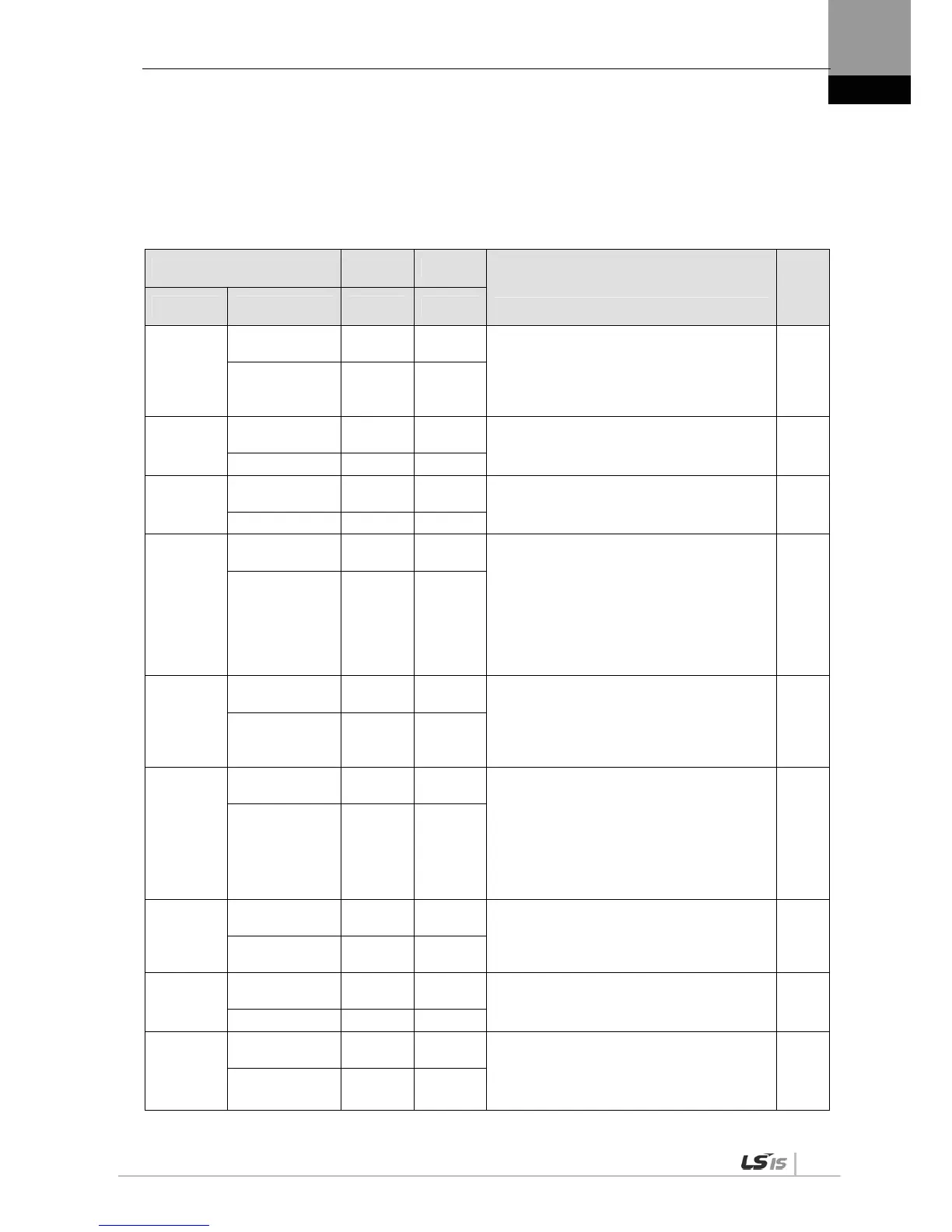
St-00
Current operation
status
- -
Displays the current operation status.
DIGIT 5: Operation Mode
DIGIT 4: ZSPD, INPOS/INSPD, Command, READY
DIGIT 3-1: Run Status
(Details: Refer to "4.1.2 Status Summary Display.")
PST
Operation status 0 0
St-01
Current operation
speed
[RPM] 0
Displays the current operation speed.
(Details: Refer to “4.3.2 Speed Display.”)
PST
Current speed -10000 10000
St-02
Current command
speed
[RPM] 0
Displays the current command speed.
(Details: Refer to “4.3.2 Speed Display.”)
ST
Command speed -10000 10000
St-03
Follow position
pulse
[pulse] 0
Displays the accumulated number of tracked position
command pulses.
Displays the accumulated number of position
command pulses that followed as a result of the
rotation of the servo motor because the servo was
turned on.
If a number is lower than the minimum or higher
than the maximum, it is displayed as the minimum
or maximum.
(Details: Refer to “4.3.3 Position Display.”)
P
Feedback pulse -2^30 2^30
St-04
Position
command pulse
[pulse] 0
Displays the accumulated number of position command
pulses.
Displays the accumulated number of position
command pulses that have been entered since the
servo turned on.
(Details: Refer to “4.3.3 Position Display.”)
P
Command pulse -2^30 2^30
St-05
Remaining
position pulse
[pulse] 0
Displays the remaining position pulses that the servo
has to operate.
This is the difference between command pulse and
tracking pulse, and displays the remaining position
pulses for the servo to operate.
The remaining position pulses, which are displayed
when the servo is off, are ignored when the servo
turns on.
(Details: Refer to “4.3.3 Position Display.”)
P
Pulse error -2^30 2^30
St-06
Input pulse
frequency
[Kpps] 0.0
Displays input pulse frequency.
P
Input Pulse
frequency
-1000.0 1000.0
St-07
Current operation
torque
[%] 0.0
Displays the current load factor against the rated load
factor.
Displays the load currently output by the servo motor as
a percentage against the rated output.
T
Current torque -300.0 300.0
St-08
Current command
torque
[%] 0.0
Displays the command load factor against the rated load
factor.
Displays the load currently output by the servo
motor as a percentage against the rated output.
(Details: Refer to “4.3.4 Torque and Load Display.”)
T
Command torque -300.0 300.0

 Loading...
Loading...
