4. Parameters
4-60
(7) Gain 1<->Gain 2 Conversion Time Setting [P1-16]
Set gain transfer time during operation.
When converting gain 1 to gain 2 and gain 2 to gain 1, conversion is scheduled according to the set
time.
(8) P / PI Conversion Mode Setting [P1-15 DIGIT 2]
Set P and PI control conversion modes. [0xF0 (DIGIT 2)]
0: Control PI only.
1: Control P if the command torque is higher than the set torque [P1-24].
2: Control P if the command speed is higher than the set speed [P1-25].
3: Control P if the current acceleration is higher than the set acceleration [P1-26].
4: Control P if the current position error is higher than the set position error [P1-27].
Control P if the PCON contact is on (highest priority).
With such functions, you can improve position operation by applying the P control operation
stop function after PI control operation.
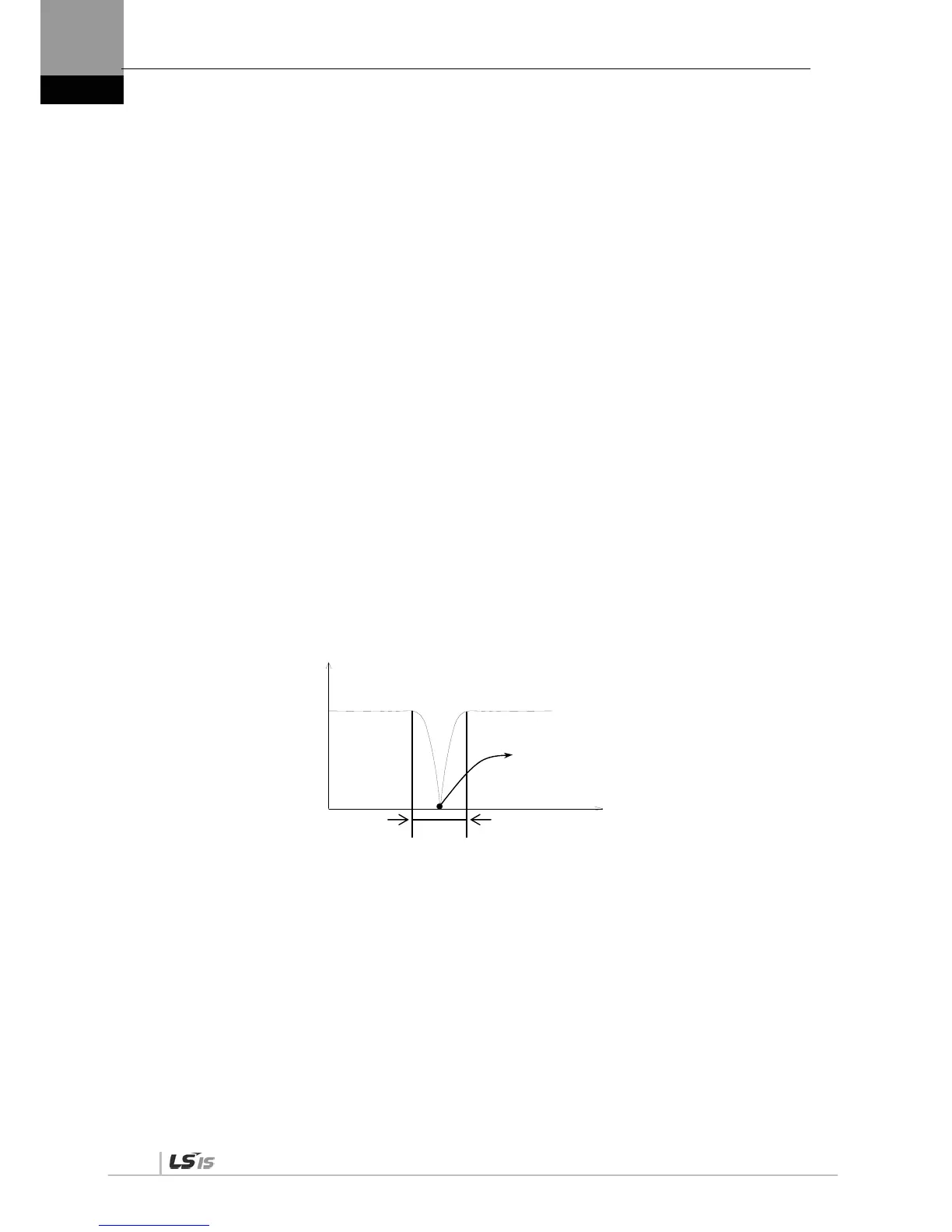
(9) Resonance Avoidance Operation Setting [P1-17], [P1-18], [P1-
19]
If vibration occurs at certain frequencies in certain systems because of mechanical
resonance, you can control the vibration by controlling torque output for the specific
frequencies.
Resonance avoidance operation [P1-17]
0: Not for use
1: Use
Resonance avoidance frequency [P1-18]
Torque output
Torque output frequency
Resonance avoidance range
BW [P1-19]

 Loading...
Loading...
