1. Product Components and Signals
2-15
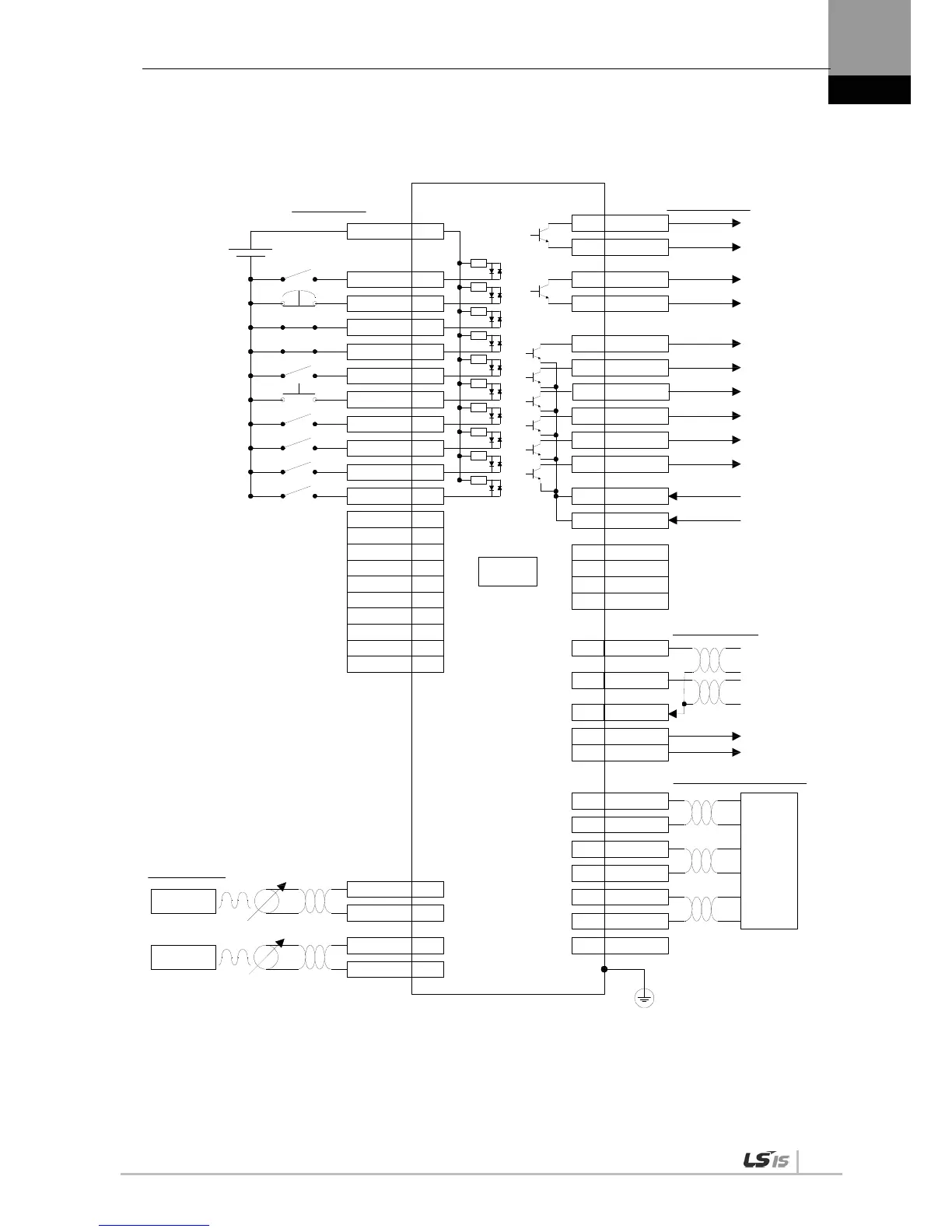
1.2.7 Example of Speed/Torque Operation Mode Wiring
STOP 48
EMG 18
CWLIM 19
CCWL IM 20
ALMRST 17
PCON
GAIN2
T_LMT
SVON 47
ALARM+38
ALARM-39
READY+40
READY-41
50+24V IN
GND2424
ALO016
ALO115
ALO214
GND2425
SPDCOM 27
GND 8
TRQCOM 1
GND 8
DC 24V
CN1
-10V ~ +10V
-10V ~ +10V
(
DIA
)
(
DI9
)
(
DI8
)
(
DI 7
)
(
DI6
)
(
DI 5
)
(
DI4
)
(
DI3
)
(
DI 2
)
(
DI1
)
(
DO1
)
(
DO2
)
(
DO3
)
(
DO4
)
(
DO5
)
VLMT
43
TLMT
45
WARN
44
INSPD
**
EGEAR1
EGEAR2
46
21
ABS_RQ
22
ZCLAMP
23
28
29
37
AO32
/AO33
BO30
/BO31
ZO4
/ZO5
SG36
-10V ~ +10V
-10V ~ +10V
34
35
3.3k
Ω
ABS_R
ST
MODE
**
**
**
**
P_CLR
DIR
SPD3
SPD2
SPD1
**
**
**
INPOS
ZSPD
BRAKE
**
**
**
**
**
**
MONIT1
MONI T2
GND
+12VA
-12 VA
Digital Input
Digital Output
Analog Output
Encoder Pulse Output
Connect to Connector Case
Analog Torque
Command/Limit
Upper Level
Controller
Note 2)
Note 2)
Note 1)
Note 1)
Analog Speed
Command/Limit
Analog Input
Note 3)
Note 1) Input signals DI1 to DIA and output signals DO1 to DO5 are default signals allocated by the factory.
Note 2) **These are non-allocated signals. You can change their allocation by setting parameters. For
information, refer to "4.1.6 External Input Signal and Logic Definition" and "4.1.8 External Output Signal and
Logic Definition."
Note 3) Input Contact Mode = ON : Speed Control Mode, Mode = OFF : Torque Operation Mode

 Loading...
Loading...
