Appendix F: PID Control
Page F–19
DuRApulse GS4 AC Drive User Manual – 1st Ed, Rev A - 10/20/2017
Type Hex Addr Dec Addr
P7.25 PID Mode Selection
R/W 0719 41818
Range/Units Default
0: Old PID mode, Kp, Kp•Ki, Kp•Kd are dependent/serial
1: New PID mode, Kp, Ki, Kd are independent/parallel
0
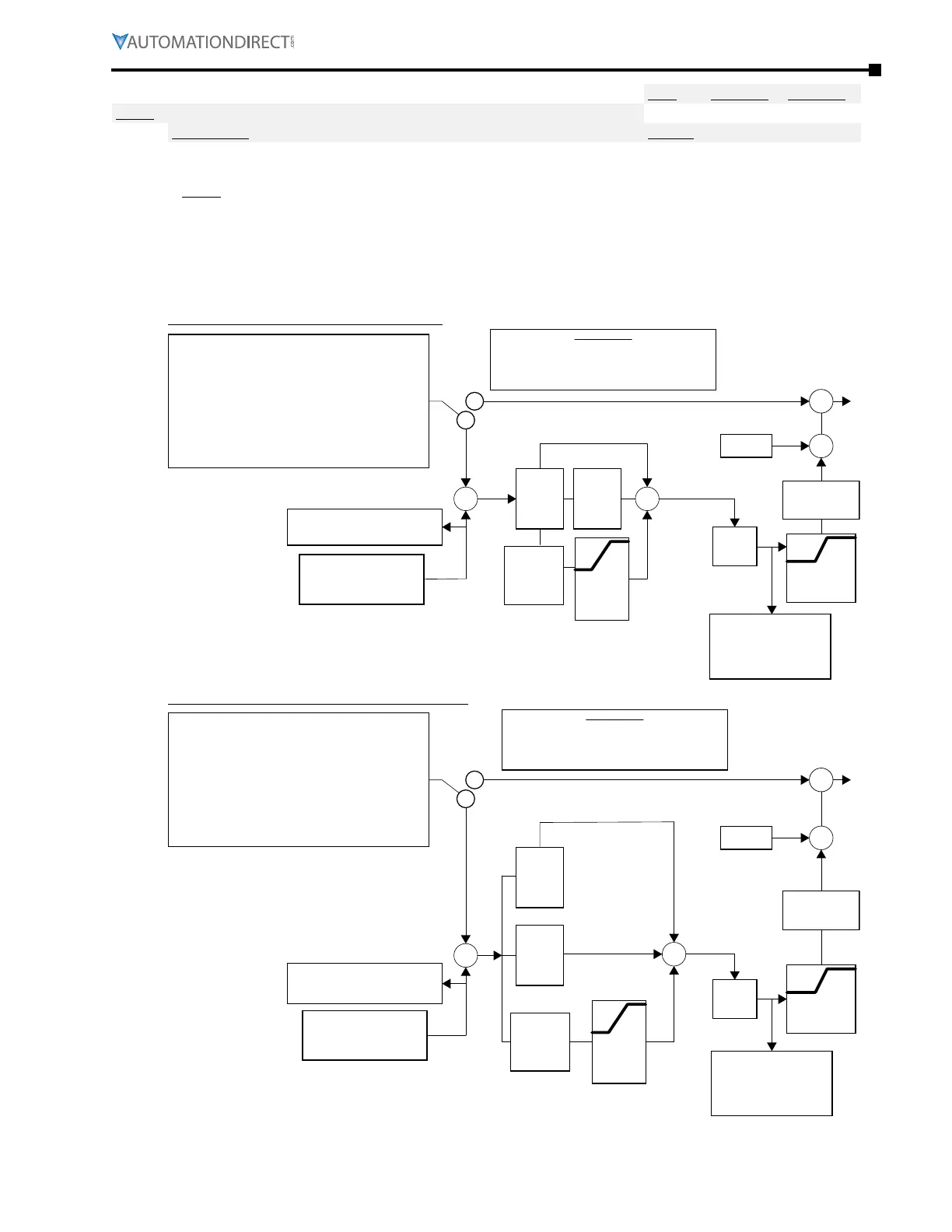
NOTE: Refer to diagrams below for P7.25=0 and P7.25=1
• Kp = Proportional Gain/Control (P7.13)
• Ki = Integral Time/Control (P7.14)
• Kd = Derivative Value/Time (P7.15)
The Serial or parallel connection PID mode selections are explained in the 2 graphics found in the
detailed information found below.
P7.25 = 0: Dependent/Serial Connection
• P7.00 = 0 - OR -
• P7.00 = 3 or 4 & drive in Local/Hand - OR -
• P7.00 = 5 or 6 & drive in Remote/Auto - OR -
• P3.03~16 = 21 (PID Function Disable)
Display of the PID Feedback
P8.00 = 10 display of the
PID Feedback
Input Selection of the
PID Feedback
P4.02~04 = 5
(PID Feedback Signal)
P
Proportion
Gain
P7.13
I
P7.14
Integral
Time
D
Derivative
Value
P7.15
PID Offset
P7.24
PID
Direction
P7.26
P7.21 PID Feedback Loss
IF:
PID feedback loss time (s)
> P7.20 Feedback Signal
Detection Time
P7.16
Upper Limit
for Integral
Time
P7.18 PID
Output
Freq. Limit
1
+
-
+
-
+
Frequency
Command
PID Setpoint can be sourced in Local Mode, Remote
Mode, or both Local and Remote modes, depending on
the setting of parameter P7.00 (PID Action/Mode).
IF Remote: set P4.00 = 0~4
IF Local: set P4.01 = 0~4
IF Remote & P4.00 = 2: set P4.02~04 = 1
IF Local & P4.01 = 2: set P4.02~04 = 2
IF Remote & Local, P4.00 & P4.01 = 2: set P4.02~04 = 3
P7.02 (PID Setpoint Source) Read Only
2
Derivative Filter
Time Constant
P7.17
P7.25 = 1: Independent/Parallel Connection
Display of the PID Feedback
P8.00= 10 display of the
PID Feedback
+
-
+
-
+
Frequency
Command
PID
Direction
P7.26
PID Offset
P7.24
Derivative Filter
Time Constant
P7.17
P7.18 PID
Output
Freq. Limit
P7.21 PID Feedback Loss
IF:
PID feedback loss time (s)
> P7.20 Feedback Signal
Detection Time
Input Selection of the
PID Feedback
P4.02~04 = 5
(PID Feedback Signal)
• P7.00 = 0 - OR -
• P7.00 = 3 or 4 & drive in Local/Hand - OR -
• P7.00 = 5 or 6 & drive in Remote/Auto - OR -
• P3.03~16 = 21 (PID Function Disable)
PID Setpoint can be sourced in Local Mode, Remote
Mode, or both Local and Remote modes, depending on
the setting of parameter P7.00 (PID Action/Mode).
IF Remote: set P4.00 = 0~4
IF Local: set P4.01 = 0~4
IF Remote & P4.00 = 2: set P4.02~04 = 1
IF Local & P4.01 = 2: set P4.02~04 = 2
IF Remote & Local, P4.00 & P4.01 = 2: set P4.02~04 = 3
P7.02 (PID Setpoint Source) Read Only
P
Proportion
Gain
P7.13
I
P7.14
Integral
Time
D
Derivative
Value
P7.15
P7.16
Upper Limit
for Integral
Time
1
2
 Loading...
Loading...

