Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
Note
Homing_Power_On=1 causes the motor to start rotating as soon as the controller is
enabled after power on or reboot. Consider all safety issues before using.
Home_N_Blind:
If the homing_method needs home signal (position limit / home switch) and index signal,
Home_N_Blind function can avoid the homing result being different with the same mechanics,
when the Index signal is very close to the home signal. By setting to 1 before homing, the
controller detects a suitable blind window for homing automatically. It can be used to assure that
homing results are always the same.
During homing, the index signal inside this blind window is ignored after the home signal is found.
Home_N_Blind (0:0rev;1:0.25rev;2:0.5rev) is defaulted to 0. If it's set to 1, it’s changed to 0 or 2
after homing depending on the index signal position relative to the homing signal.This parameter
needs to be saved. If the mechanical assembly is changed or the motor has been replaced, just set
it to 1 again for initial homing.
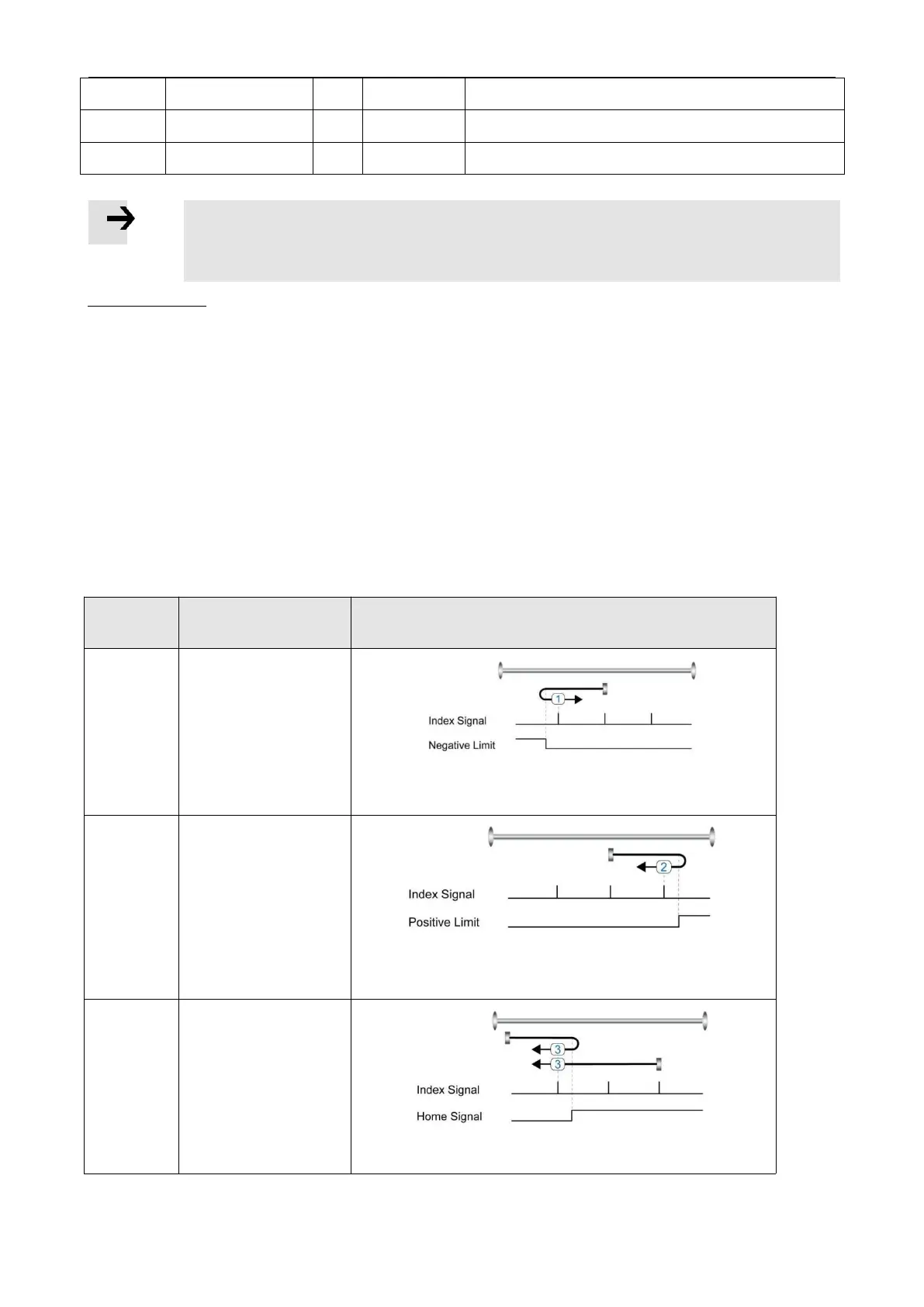
Table 6-23 Introduction to the homing method
Homing with negative
position limit switch and
index pulse
Homing with positive
position limit switch and
index pulse
Homing with home switch
and index pulse
 Loading...
Loading...

