4. Parameters
4-58
Feedforward gain [P1-04]: Calculate the gradient with the differential value of the position command.
Reduce time to target position by adding the speed command to the gradient. If the resultant
value is too big, overshooting or instability might occur in position control. Therefore, it is important
to gradually increase the value from a small value while watching the test drive.
Feedforward filter [P1-05]: If position commands change too drastically, the feedforward control
filter vibrates. In this case, set a filter value to remove the vibration.
(3) Speed Control Gain
Speed command: Use an analog speed signal entering from outside as a speed command after
running it through the speed command filter [P1-10], or use a digital speed command and [RPM]
set in the internal parameter.
Current speed: Calculate speed by counting encoder signals as time progresses, and use the
calculated speed as the current speed after running it through a filter. An algorithm, which projects
speed by using the current torque and inertia, is used to make up for the errors occurring during
speed calculation at a very low speed. Therefore, an accurate motor constant and inertia ratio are
closely associated with the stability of motor speed control.
Speed integral time constant [P1-08]: Calculate the integral value of the speed error, which is the
difference between the command and the current speed, and convert it into a torque command by
multiplying it by integral time constant.
A decreased integral time constant solves the transient response issue and thus improves speed
tracking. If the integral time constant is too small, however, overshoot occurs. On the other hand,
if the integral time constant is too big, excessive response drops and proportional control takes over.
* Recommended value = 10000 / speed proportional gain [P1-06]
Speed proportional gain [P1-06]: Convert the speed error into a torque command by multiplying it
by proportional gain.
If the result value is large, speed response accelerates and thus speed tracking increases. If the
value is too big, however, vibration occurs. If the value is too small, speed response slows down
and speed tracking decreases. Consequently, the servo loses its power.
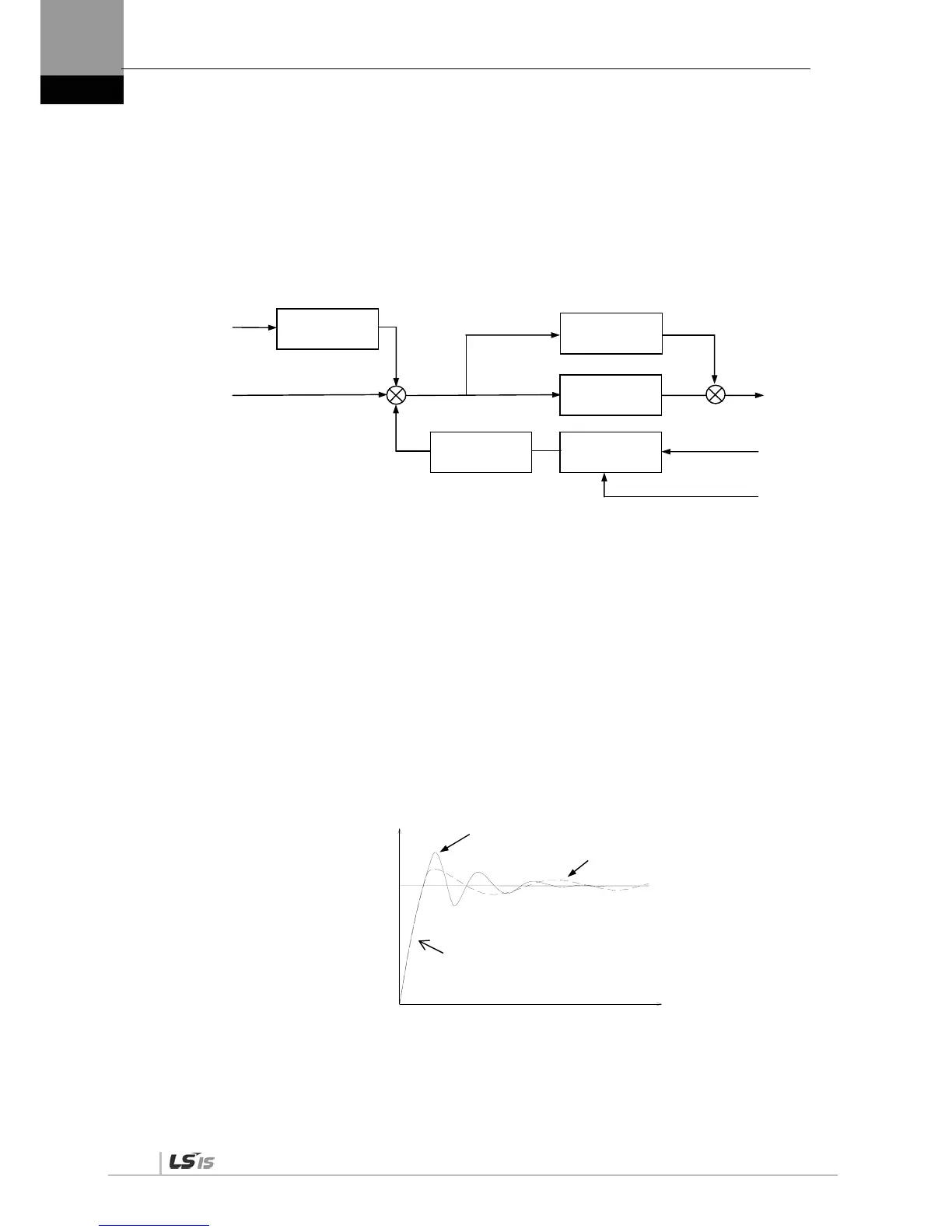
Analog
speed
command
Speed command
filter time constant
[P1- 10]
Speed integral
time constant

 Loading...
Loading...
