4-82 ECODRIVE03 DKC**.040, DKC**.100, DKC**.200 ECODRIVE03 Drive Controllers
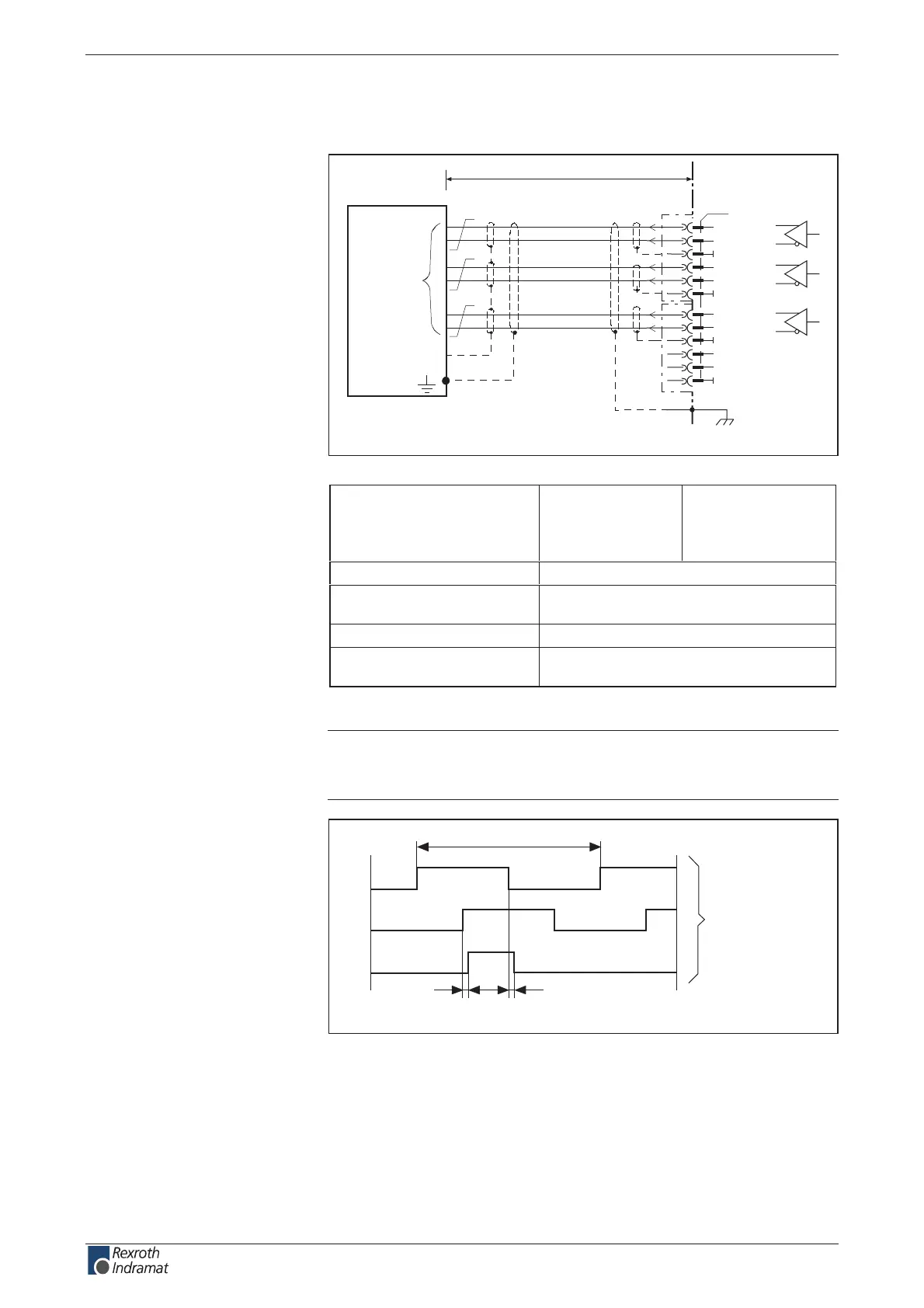
Incremental encoder emulation
AP5282F1.FH7
length l
CNC
positioning
interface
-incremental-
0 V
ext
1
IgsUA1+
2
IgsUA1-
3
0V
4
IgsUA2+
5
IgsUA2-
6
0V
7
IgsUA0+
8
IgsUA0-
9
0V
10
11
0V
X9
12
XS3
Fig. 4-125: Connection of incremental actual position value output
Output voltage:
High
Low
min.
2.5 V
0 V
max.
5 V
0.5 V
max. output current I
out
I20I mA
max. load capacitance
Fn 01V 0 dna tuptuo neewteb
zHM 1f ycneuqerf tuptuo .xam
Overload protection Outputs may not be short circuited. Danger
of damage!
Fig. 4-126: Dierential outputs
Note: The dierential outputs correspond to RS422 specs.
A termination resistor is required an the controller side, if it is
not present then add an external resistance of 150 - 180 Ohm.
one line
t1
UA1
UA0
UA2
Square-wave pulse
looking at the motor
shaft and in
clockwise direction
SV0201F1.FH7
t1 < 50 ns
t1
Fig. 4-127: Signal for incremental actual position value output
Connection
Incremental encoder emulation:
Dierential outputs incremental
encoder emulation:
Signal for incremental actual
position value output:
customerservice@hyperdynesystems.com | (479) 422-0390

 Loading...
Loading...