ECODRIVE03 Drive Controllers ECODRIVE03 DKC**.040, DKC**.100, DKC**.200 4-103
SV0200d1.Fh7
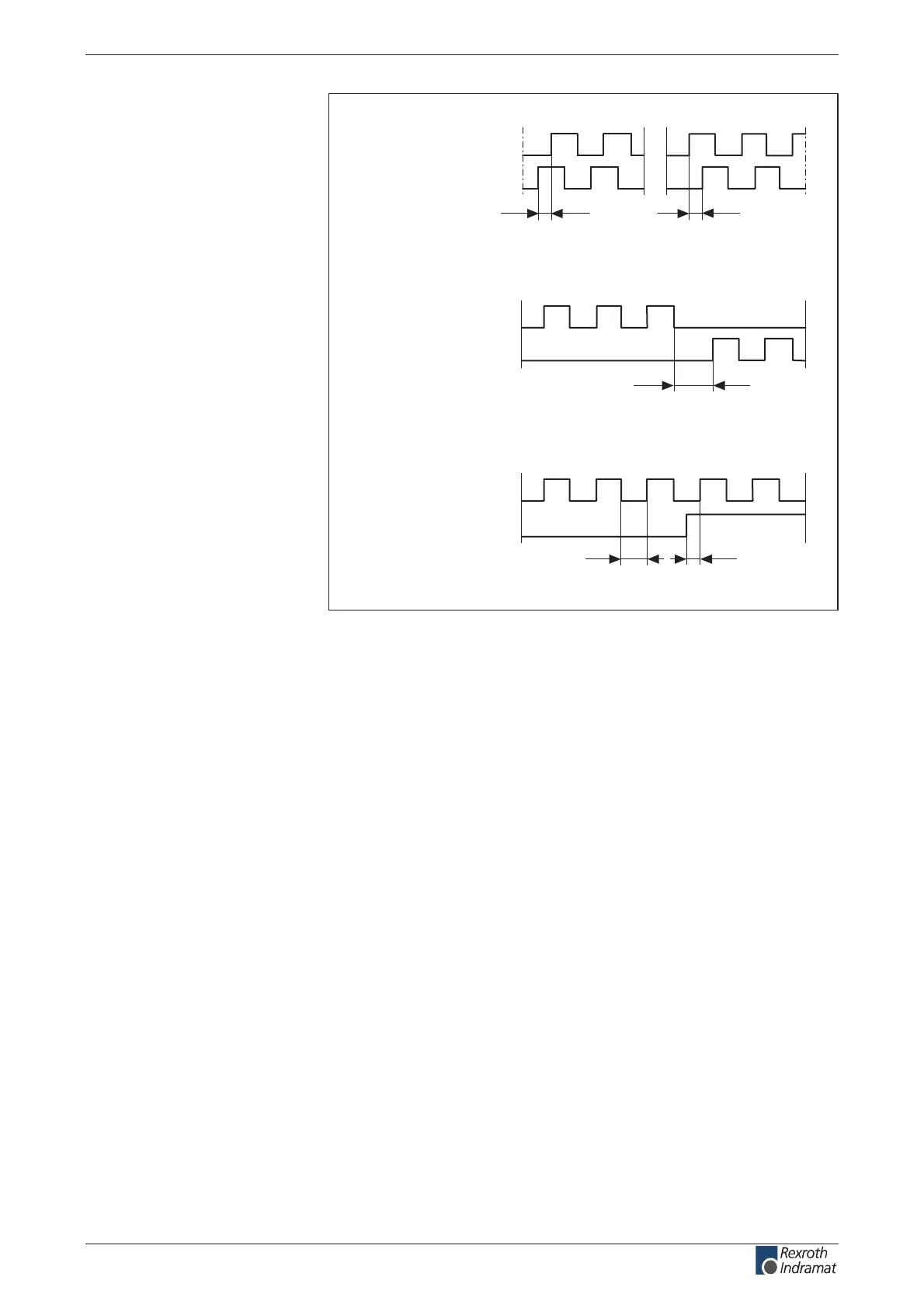
1:
Quadrature-signals
2: Seperate signals for forward/ backward count
3:
Count and direction signals
SM 1
SM 2
SM 1
SM 2
SM 2
SM 1
turning ccw
t1
t2
t3
t
L
turning ccw turning cw
wc gninrutwcc gninrut
t2 5,6 µs
t3 5,6 µs
tL 2,8 µs
t1 1,4 µs
turning cw
t1
Fig. 4-174: Stepper motor interface types of control
• Logic 1 is detected with a positive voltage dierence of SM+ to SM-.
• Logic 0 is detected with a negative voltage dierence of SM+ to SM-.
• To increase noise immunity the amplitude of the voltage dierence
should equal at least 3.0 volts. The greater the voltage dierence, the
better the noise immunity.
Controlling with the stepper
motor interface:
Control with dierential signals:
customerservice@hyperdynesystems.com | (479) 422-0390

 Loading...
Loading...