Operating instructions Distance measuring device DL100 – CANopen®
CANopen®-interface
118 © SICK AG • Subject to change without notice • 8015416/ZPN2/2017-09-08
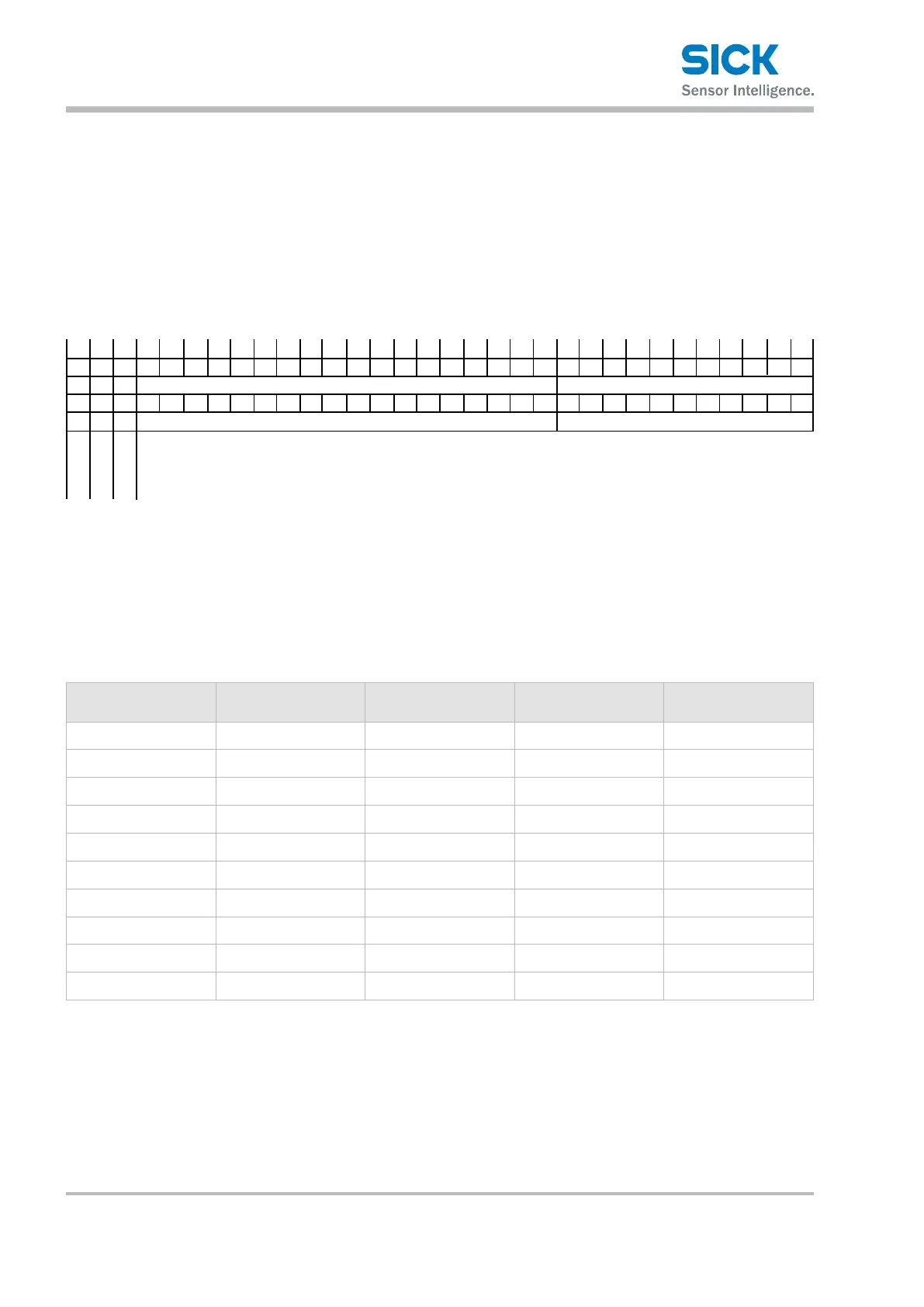
Example (continuation) Therstthreebits(MSB)are
• TPDO active MSB = 0
• TPDO supports RTR MSB – 1 = 0
• TPDO uses 11-bit CAN-ID. MSB – 2 = 0
The other bits come from the 11 bit CAN-ID that is to be set. This is no
longer Node-ID related from TPDO5.
The following table must be used for the selection of the CAN-ID: In this
example, the CAN-ID 4FFh is selected. This leads to the following telegram:
31
valid
MSB
PDO exists
d
30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9876 5432
LSB
RTR
frame
0
000000
000 4FFh
000000000 00000
0
0
1
11
1
11
1
1
11-Bit CAN-ID00000h
Dynamic mapping serves to map objects to a TPDO. By default, the TPDOs5
and 6 are empty and can take up objects. Dynamic mapping permits put-
ting objects that can be mapped into the TPDOs.
TPDO1andTPDO2arealreadystaticallymappedinthedeviceproleCiA
406 and cannot be used for dynamic mapping.
The following objects can be mapped:
Index Subindex Name Data type Resulting mapping
entry
2000h 0h Distance Integer32 0x2000 00 20
2001h 0h Velocity Integer32 0x2001 00 20
2002h 0h Time Stamp Unsigned32 0x2002 00 20
2003h 0h Level Integer16 0x2003 00 10
2004h 0h Warnings Unsigned8 0x2004 00 08
2005h 0h Errors Unsigned8 0x2005 00 08
6004h 0h Position Value Unsigned32 0x6004 00 20
6030h 1h Speed Value Channel 1 Integer16 0x6030 01 10
6503h 0h Alarms Unsigned16 0x6503 00 10
6505h 0h Warnings Unsigned16 0x6505 00 10
Table 70: POD