DANGER
H
azard due to lack of effectiveness of the protective device
In the case of non-compliance, it is possible that the dangerous state of the machine
may not be stopped or not stopped in a timely manner.
In addition to the protective device’s response time, further signal transmission and
processing also influence the time up until the end of the dangerous state. These
include the network cycle time, a control’s processing time and the response times of
downstream contactors, for example.
►
Take the time for further signal transmission and processing into account.
Response time
T
he safety laser scanner’s response time depends on the following parameters:
•
Scan cycle time
•
Set interference protection
•
Set multiple sampling
You can calculate the response time using the following formula:
t
R
=(t
S
+t
I
)×n+t
O
The following rules apply:
•
t
R
=response time
•
t
S
=scan cycle time
°
Setting “30ms”: t
S
= 30ms
°
Setting “40ms”:t
S
=40ms
°
Setting “50ms”: t
S
= 50ms
•
t
I
=time for interference protection
°
Mode 1 (default):t
I
=0ms
°
Mode 2:t
I
=1ms
°
Mode 3:t
I
=2ms
°
Mode 4:t
I
=3ms
•
n=set multiple sampling
Preset to n=2.
Multiple sampling can be changed for the safety laser scanner or for each individ‐
ual f
ield (2≤n≤16).
•
t
O
=t
ime for processing and output
Dependent on output used:
°
E
therCAT: t
O
= 35ms
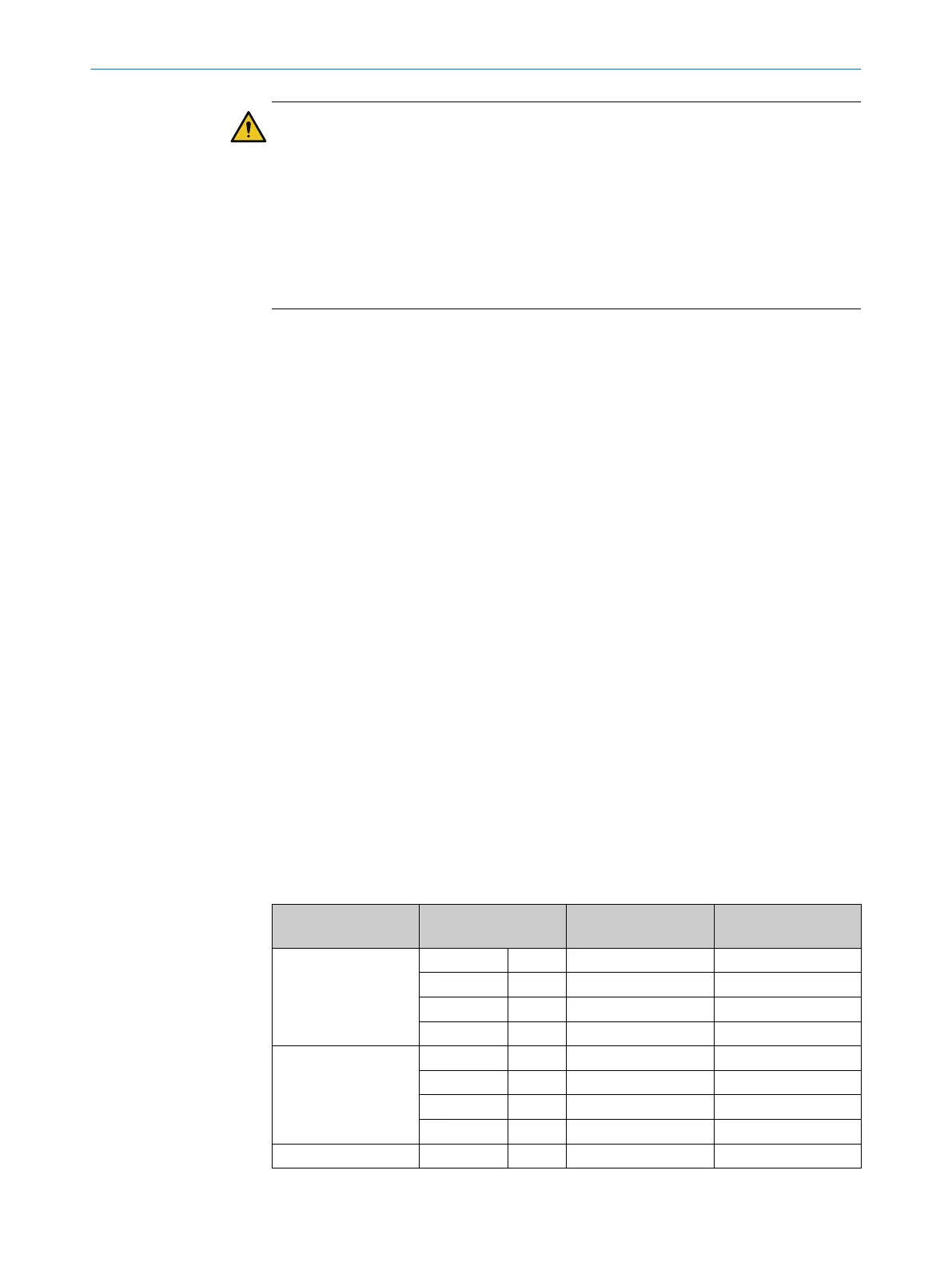
Table 38: Response time of an individual safety laser scanner
Scan cycle time (t
S
) Interference protec‐
t
ion (t
I
)
Output (t
O
) t
R
=response time for
multiple sampling n
30ms Mode 1 0ms EtherCAT® n × 30ms + 35ms
Mode 2 1ms EtherCAT® n × 31ms + 35ms
Mode 3 2ms EtherCAT® n × 32ms + 35ms
Mode 4 3ms EtherCAT® n × 33ms + 35ms
40ms Mode 1 0ms EtherCAT® n × 40ms + 35ms
Mode 2 1ms EtherCAT® n × 41ms + 35ms
Mode 3 2ms EtherCAT® n × 42ms + 35ms
Mode 4 3ms EtherCAT® n × 43ms + 35ms
50ms Mode 1 0ms EtherCAT® n × 50ms + 35ms
TECHNICAL DATA 13
8025220/1L9Q/2023-08-14 | SICK O P E R A T I N G I N S T R U C T I O N S | microScan3 – EtherCAT®
167
Subject to change without notice