✓
If t
he result is C
RO
≥850mm, then use the calculated value as supplement C
RO
.
✓
If the result is C
RO
<850mm, then use C
RO
= 850mm (this value corresponds to
an arm’s length and is valid as a minimum supplement to protect against reaching
over).
4.3.6.3 Height of the scan plane
Overview
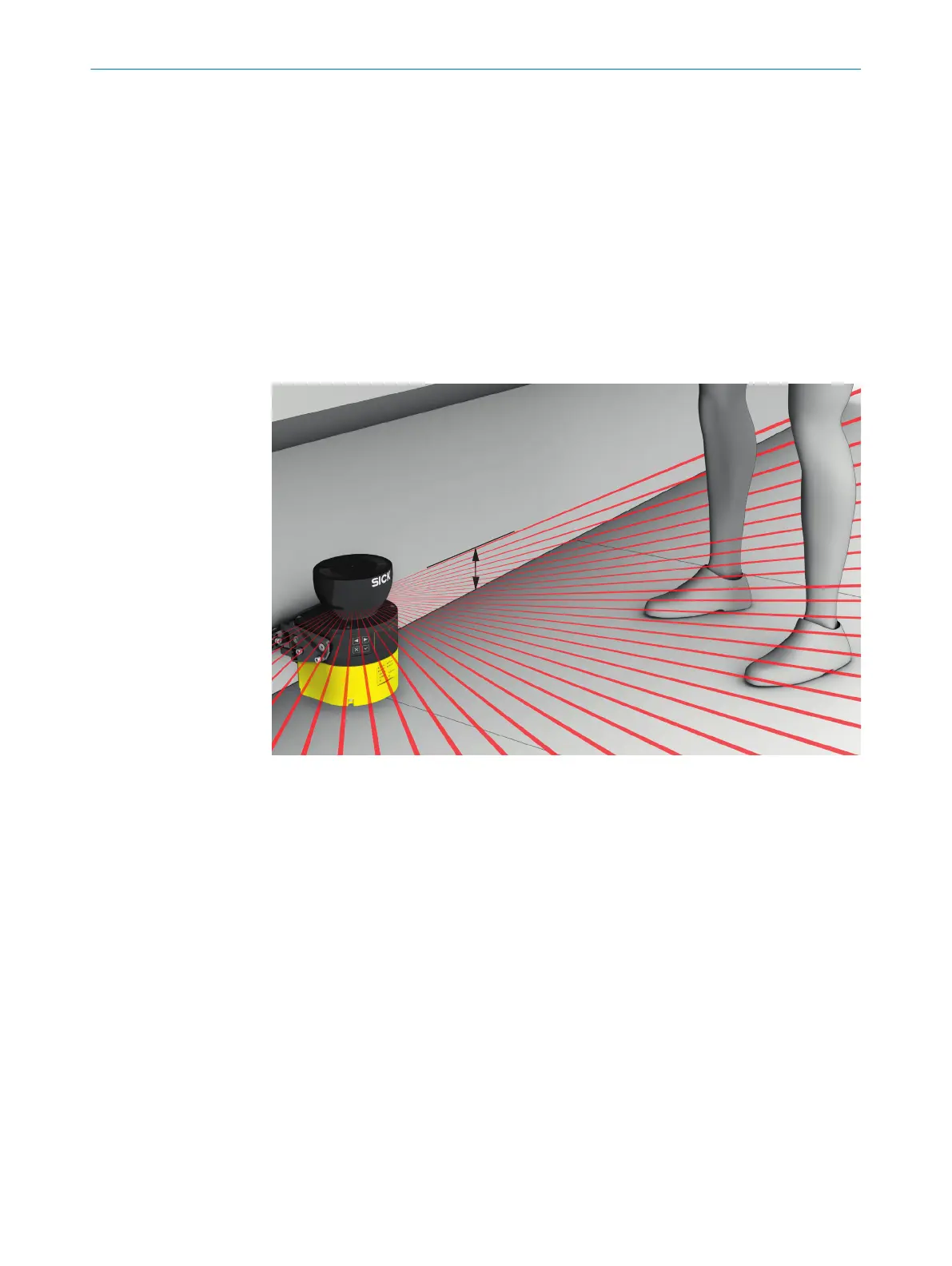
If y
ou choose a resolution of 70mm for hazardous area protection, it is not possible to
detect a human leg under certain circumstances. This is because a beam does not hit
the leg. Rather, the beams pass by the sides of the ankle (see figure 29, page 38). If
you mount the safety laser scanner at a height of at least 300mm (height of the scan
plane), the scan plane is at calf height and the leg is detected even at a resolution of
70mm (see figure 30, page 39).
Figure 29: Scan plane at ankle height
4 P
ROJECT PLANNING
38
O P E R A T I N G I N S T R U C T I O N S | microScan3 – EtherCAT® 8025220/1L9Q/2023-08-14 | SICK
Subject to change without notice